
 商标分类
商标分类  商标转让
商标转让 
用于运行交通工具中的自动驾驶功能的方法和系统与流程
 2021-02-03 14:02:21|
2021-02-03 14:02:21| 355|
355| 起点商标网
起点商标网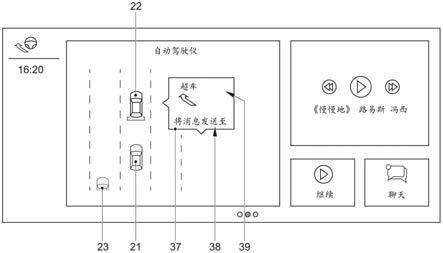
用于运行交通工具中的自动驾驶功能的方法和系统
[0001]
本发明涉及一种用于运行交通工具中的自动驾驶功能的方法和系统。
[0002]
在现代的交通工具中越来越多地规定,可以高度自动化地执行多个单独的或者复杂的驾驶员任务序列,甚至执行沿着期望的路线的全自动驾驶。这种交通工具的用户可以通过手动干预、尤其是通过给出目的地位置、规划通往目的地的路线或者通过与确定的自动驾驶功能相关的设置而在一定程度上影响驾驶。在此可以确定的是,在现有的系统中需要费事的操作过程,以便在部分的或者完全的自动驾驶期间对自动系统、例如自动驾驶仪的驾驶或者驾驶方式实施影响。
[0003]
由专利文献de 10 2014 208 311 a1已知一种驾驶员辅助系统,在所述驾驶员辅助系统中,对交通工具的导引(或者说控制)与交通工具驾驶员的个性化需求适配。为此规定具有多个参数的用户特定配置,所述参数例如根据用户在通过模拟器驾驶或者手动控制的驾驶时的行为确定。
[0004]
专利文献de 10 2016 203 827 a1建议了一种方法,在所述方法中,在自动驾驶期间检测交通工具乘员的指令并且根据所述指令确定新的行驶路线。
[0005]
因此本发明所要解决的技术问题在于,提供一种开篇所述类型的方法和系统,在所述方法和系统中,交通工具的用户能够简单并且快速地影响和控制自动驾驶功能的工作方式。
[0006]
按照本发明,所述技术问题通过具有权利要求1的特征的方法和具有权利要求10的特征的系统解决。有利的设计方案和扩展设计由从属权利要求给出。
[0007]
在按照本发明的方法中,检测交通工具的周围环境中的环境数据并且根据所检测的环境数据产生并且输出环境视图的图形数据。在这种情况下,环境视图包括至少一个第一操作对象,其中,当检测到对第一操作对象的操控(或者说操作)时,产生对应配属于所述第一操作对象的选择对象。检测对选择对象的操控,并且根据对所述选择对象的操控产生控制信号,其中,根据所述控制信号执行自动驾驶功能。
[0008]
由此能够有利地提供图形操作表面,用户能够根据所述图形操作表面特别简单、快速并且直观地输入其期望的设置和控制指令。由于相关的操作元件以能够特别容易地够到的方式布置,因此这也实现了人体工程学方面有利的操作。此外能够非常快速地进行对自动驾驶功能的干预,因为能够通过操作对象和选择对象直接地进行操控。由此提高了在运行自动驾驶功能时的安全性。此外可以使用户更加信任自动驾驶功能,因为用户具有清晰的交互可能性,并且能够以容易理解的方式显示系统的数据。因此没有必要突然地关闭自动驾驶仪或类似的自动驾驶功能以允许驾驶员干预控制系统。此外,通过所产生的视图,对于副驾驶员和/或其他交通工具乘员也能够是可见的并且在必要时是可操作的,以使得副驾驶员和/或其他交通工具乘员不会因自动的驾驶机动而感到惊讶。
[0009]
对环境数据的检测以本身已知的方式、尤其是借助交通工具的传感器实现。所述传感器例如可以包括光学的、电磁的、声学的传感器或者其它传感器。例如可以使用摄像机、立体摄像机、3d摄像机、红外摄像机,激光雷达-或者雷达传感器或超声传感器。环境数据尤其包括与交通相关的控制对象、例如其它交通参与者、交通控制装置和道路走向的标
记或沿着交通道路的其它标记。对环境数据的检测在此尤其与自动驾驶功能适配并且适用于提供对于执行自动驾驶功能所必要的信息。附加地或者备选地,环境数据能够借助与外部装置的接口进行检测,所述外部装置例如为中央的检测装置、例如用于交通观察的摄像机或者外部的服务设备、例如外部的服务器。环境数据尤其包括交通工具的周围环境中的与交通相关的对象的位置、方向和速度。尤其还包括关于自身的交通工具(或者说本交通工具)的行驶状态、例如位置、速度、方向或者行驶的路线的数据。
[0010]
环境视图包括至少一个代表了由环境数据得出的信息的图形元素。由环境视图所包括的第一操作对象尤其是自身的交通工具(ego-fahrzeug)的代表。第一操作对象在此尤其可以包括交通工具视图。环境视图还可以包括交通工具的周围环境中的与交通相关的对象的代表、尤其形式为示意性视图。在此尤其示出了其他交通参与者、例如交通工具或者行人、行车道标记和/或道路走向。第一操作对象尤其代表了交通工具的环境中的交通状况的元素、例如自身的交通工具。第一操作对象因此例如可以布置在环境视图内的下述位置处,所述位置与交通工具在道路、尤其是在确定的车道上的位置对应。因此,操作对象尤其不设计为静态视图中的未与交通工具环境中的交通状况相结合的简单的几何操作面或类似元件。
[0011]
可以以本身已知的方式、例如通过借助触摸屏、触摸板、操纵杆、旋转按钮或转向柱上开关在图形操作表面内选择第一操作对象来检测对第一操作对象的操控。备选地或者附加地也可以考虑操控的其它可行性。环境视图例如可以包括显示为交通工具符号的第一操作对象并且可以通过在操作对象的区域中触碰触摸屏实现操控。
[0012]
在操控第一操作对象之后产生的选择对象可以以不同的方式设计。所述选择对象例如可以设计为弹出窗口或者关联菜单的形式。尤其可以包括例如在选择对象内显示为多个单独的操作面的多种选择可行性。选择对象尤其包括与自动驾驶功能的不同的驾驶机动或者其它不同方面或者功能性对应的多种选择可行性。
[0013]
在操控选择对象时检测所述操控是如何进行的、例如操控选择对象的哪个区域或者所述操控是否与确定的选择可行性或者功能性对应。如果根据对选择对象的操控产生了控制信号,则首先确定操控是如何进行的或者检测操控时的输入参数并且接着产生相应的控制信号。选择对象例如可以包括关联菜单,在操控所述关联菜单时触碰所述关联菜单和确定的选择可行性的区域中的触摸屏。根据操控产生控制信号并且传递至控制自动驾驶功能的装置。根据控制信号例如可以通过请求确定的机动(动作)或者调节形成确定的行驶方式而对自动驾驶功能的工作方式产生影响。在此尤其根据控制信号产生用于自动驾驶功能的控制指令。在此可以立即地或者在时间上延迟地执行,其中,尤其是延迟地、直到能够安全地实现时才执行。
[0014]
环境视图尤其还包括具有图形元素的计划显示内容,所述图形元素体现当前执行的驾驶机动和/或将来计划的驾驶机动。例如可以根据箭头显示来示出计划的行车道变换或者超车过程,可以以类似的方式显示方向改变、尤其是离开车道。例如在识别到另一交通工具准备超车或想要在自身的交通工具之前驶入时,计划显示内容还可以包括其它交通参与者的预测的行为。计划显示内容还可以包括关于路线计划的信息,例如待行驶的道路的标记或者计划的方向改变,以遵循计划的路线行驶。
[0015]
在按照本发明的方法中,环境视图代表交通工具的环境中的实际的或者预测的交
通情况。自身的交通工具在此尤其位于环境视图的中央,并且由相应的图形对象、尤其是第一操作对象表示。环境视图例如包括图形对象,所述图形对象用于尤其以示意性的构造、以与交通工具环境中的实际情况相对应的布局来代表其它交通参与者。从环境视图中例如可以看出,在行驶方向上是否有另一交通工具处于自身的交通工前面、尤其是间隔多少距离。与此类似地可以显示自身的交通工具之后的或者其它行车道上的其它交通工具或者其它交通参与者、例如迎面驶来的交通工具或者在相邻的车道上以相同行驶方向行驶的交通工具。
[0016]
在根据本发明的方法的一种设计方案中,根据对选择对象的操控产生涉及行车道变换、转弯、改变与其它交通参与者的距离或改变交通工具速度的控制信号。由此能够有利地对自动驾驶功能的特别重要的参数产生影响。此外能够控制其它机动、例如超车过程、驶向确定的特殊目标(如下一个休息区)或者在下一个出口离开当前行驶的道路。在此尤其确保了可以在任何时间安全地导引交通工具,即例如能够保持预设的安全距离。同时可以请求机动,而无需为此对当前行驶的路线重新编程、终止自动驾驶功能和/或手动干预驾驶。
[0017]
自动的控制功能的所述机动或者参数尤其是针对由第一操作对象代表的交通参与者,即尤其是针对自身的交通工具而言的。由此使操作与交通情况直接相关,即用户操控对应配属于其自身的交通工具的操作对象,并且随即能够设置确切地用于控制该交通工具的参数。
[0018]
在另一设计方案中,环境视图包括至少一个其它操作对象,其中,当检测到对其它操作对象的操控时,产生对应配属于所操控的其它操作对象的其它选择对象。检测对其它选择对象的操控,并且根据对所述其它选择对象的操控产生控制信号,其中,根据所述控制信号执行自动的驾驶功能。由此能够有利地提供用于控制自动驾驶功能的不同选择对象,并且在具有例如与其它交通参与者相关的操作对象的视图中予以提供。
[0019]
所述其它操作对象尤其代表不同于自身的交通工具的其它交通参与者。所述其它操作对象例如可以这样在环境视图中输出,使得所述其它操作对象相对于与自身的交通工具对应的第一操作对象如在实际的交通情况中那样地布置。在此尤其可以进行实际交通情况的简化或者抽象,从而简化地实现与交通相关的环境的显示。从第一操作对象和其它操作对象在环境视图内的布置尤其可知,其它交通参与者是在自身的交通工具的后方、前方还是旁边行驶。此外,可以在视图中输出,其它交通参与者是否以及在何种程度上接近或者远离自身的交通工具。
[0020]
所述其它选择对象尤其包括用于不同机动的操作面,其中,所述其它选择对象的选择可行性可以设计得与对应配属于所述第一操作对象的选择可行性不同。
[0021]
在所述方法的一种设计方案中,根据对其它选择对象的操控产生涉及与其它交通参与者有关的驾驶机动的控制信号。由此能够有利地这样控制自动驾驶功能,使得能够根据其它操作对象来进行或者辅助驾驶机动,所述驾驶机动涉及自身的交通工具关于其它交通参与者的行为。
[0022]
这种与其它交通参与者相关的驾驶机动例如可以是超车机动。所述驾驶机动也可以是从旁边驶过或者自身的交通工具可以跟随其它交通工具。还可以规定,例如借助数据技术上的连接与其它交通参与者建立通信连接,通过所述连接例如能够将控制信号和/或消息、尤其是文本或其它消息发送给其它交通工具驾驶员。
[0023]
在另一设计方案中,将图形数据传递至用户设备并且通过所述用户设备输出,其中,所述用户设备对应配属于副驾驶员或者交通工具乘客。由此使得除了交通工具驾驶员之外,自身的交通工具的其他乘员以及必要时其它人员也能够有利地访问环境视图的信息,并且在必要时以控制的方式进行干预。备选地或附加地可以规定计划功能性,在所述计划功能性中,多个人能够通过自己的用户设备协作式地计划或影响行驶。
[0024]
用户设备可以是交通工具外部的设备、例如移动电话、平板电脑或者其它便携式计算机。用户设备还可以是交通工具内部的设备、例如在副驾驶员侧或者在用于其它交通工具乘员的交通工具后座中集成在交通工具中的触摸屏。用户设备可以以不同的方式、尤其是借助无线的数据技术上的连接或者通过尤其是借助集成在交通工具中的容纳装置(托架)的线缆连接而与交通工具耦连。
[0025]
在另一设计方案中,用户设备可以对应配属于不同于副驾驶员或者交通工具乘员的其它用户,例如对应配属于能够通过数据技术上的连接对交通工具的行驶产生影响和必要时进行干预的操作者。
[0026]
在另一设计方案中,进行对用户设备的识别并且根据所述识别来产生选择对象。备选地或者附加地可以进行对用户的识别。由此能够有利地根据不同的权限控制借助用户设备输出的信息。此外,能够借助选择对象控制的驾驶功能能够与不同用户的不同的权限和重要性适配。
[0027]
根据识别出哪个用户设备或者哪个用户可以输出确定的信息。由此例如可以确保,自动驾驶功能的即将进行的驾驶机动不会使副驾驶员或者其它交通工具乘员感到惊讶。此外,其它用户例如能够通过在交通工具中进行讨论而对自动的驾驶机动的计划产生影响。此外可以规定,通过不同于驾驶员的其它交通工具乘员产生针对自动驾驶功能的、例如与路线规划或一般的驾驶行为有关的确定的控制信号。
[0028]
可以以不同的、本身已知的方式、例如借助用户特定配置、借助密码的识别、借助生物统计学的数据或者借助实体对象(交通工具钥匙,用户设备的实体身份)进行识别。备选地或者附加地,可以根据用于交通工具中的触摸屏的接近检测装置进行识别,其中,例如检测操作者的手从哪个方向、尤其是从驾驶员座椅还是副驾驶员座椅的方向接触到触摸屏。此外,可以将电磁场入射到用户中,并且可以将通过用户的手指出射的场用于识别。
[0029]
在一种扩展设计中还包括其它信息选择对象,在操控所述其它信息选择对象时输出交通工具的状态。由此能够有利地提供关于交通工具状态和/或关于自动驾驶功能的信息。
[0030]
在操控信息选择对象时例如可以输出行驶参数、例如当前速度、建议速度(或者说标准速度)、路线的目的地、即将进行的超车机动、用于超车行为的一般设置、计划的下一个机动和方向改变、计划的驶离道路或者其它信息。
[0031]
在本发明的一种设计方案中,根据所选择的第一选择对象或者其它选择对象检测用于自动驾驶功能的设置参数或激活行驶特性。设置参数尤其包括额定速度或者保守型(或者说防御型)的或者运动型的驾驶方式的程度。由此例如可以控制的是,例如在为了超车而改变方向时应当达到更高的(运动型的)还是更低的(保守型的)横向加速度。此外,行驶特性可以包括多个设置参数,所述设置参数例如能够由交通工具或者系统的制造者预设或者由用户自身定义。由此能够有利地使自动驾驶功能与用户的需求适配。对借助自动驾
驶功能的驾驶行为的设置能够以特别简单快速的方式实现。
[0032]
在另一设计方案中,根据在用户的手动驾驶期间或者在用户的模拟驾驶期间检测的数据产生行驶特性。由此能够这样形成行驶特性,使得所述驾驶特征至少与一个或者多个设置参数相关地模仿用户的手动驾驶方式。例如可以确定用户在手动驾驶时通常在确定的情况下达到的平均速度。此外可以确定并且存储超车行为。
[0033]
在一种扩展设计中,图形数据还包括至少一个操作面,其中,在操控所述操作面时产生控制信号,其中,根据所述控制信号执行自动驾驶功能。在此尤其能够提供用于确定的机动或者用于调节形成确定的设置参数或行驶特性的快速选择按钮。由此有利地实现了,能够特别快速地进行确定的操作。
[0034]
例如可以在与环境视图邻接的区域中示出快速选择按钮。所述快速选择按钮还可以借助实体的开关实施。操作面尤其包括符号化地表示确定的驾驶机动的图形视图。
[0035]
按照本发明的用于运行交通工具中的自动驾驶功能的系统包括环境检测单元,通过所述环境检测单元能够检测交通工具的周围环境中的环境数据。所述系统还包括控制单元,通过所述控制单元能够根据所检测的环境数据产生具有至少一个第一操作对象的环境视图的图形数据,并且所述图形数据能够借助显示单元输出,所述系统还包括输入单元,通过所述输入单元能够检测对第一操作对象的操控。控制单元在此这样设置,使得当检测到对第一操作对象的操控时,产生对应配属于所述第一操作对象的选择对象。此外,检测对选择对象的操控并且根据对选择对象的操控产生控制信号。在此能够根据控制信号执行自动驾驶功能。
[0036]
按照本发明的系统尤其设计用于实施按照本发明的前述方法。所述系统由此具有与按照本发明的方法相同的优点。
[0037]
尤其借助触摸屏、触摸板、操纵杆或者转向柱上开关检测对操作对象和/或选择对象的操控。输入单元备选地或者附加地包括其它用于检测用户输入或者操控的装置。
[0038]
以下根据实施例参照附图阐述本发明。
[0039]
图1示出了具有按照本发明的系统的实施例的交通工具,并且
[0040]
图2a、2b和2c示出了在按照本发明的方法的实施例中产生的环境视图的示例。
[0041]
参照图1阐述具有按照本发明的系统的实施例的交通工具。
[0042]
交通工具1包括控制单元5。触摸屏2、环境检测单元6、驱动单元7和转向单元8与所述控制单元5耦连。在该实施例中,环境检测单元6包括多个不同的传感器,通过所述传感器能够检测交通工具1的周围环境中的环境数据。传感器未详细示出并且尤其包括摄像机和其它光学传感器、雷达传感器、激光雷达传感器和超声传感器以及与外部服务器的接口,其中,实现与外部的服务设备的通信,用于提供由其它装置检测的关于交通工具的周围环境的数据。
[0043]
触摸屏2包括显示单元3和输入单元4。所述显示单元3和输入单元4以本身已知的方式前后相继地这样布置,使得输入单元4的触碰敏感的表面布置在显示单元3上方并且在触碰敏感的表面的确定区域上的触碰能够与显示单元3上的显示内容内的位置对应。此外,用户设备10与控制单元5耦连。该耦连包括数据技术上的连接并且尤其能拆卸地或者无线地设计。尤其可以在控制单元5和用户设备10之间存在数据技术上的无线电连接,所述无线电连接通过本身已知的方法、例如借助无线局域网(wlan)、蓝牙或者近场通信(nfc)建立。
用户设备10还能够借助线缆连接的数据技术上的连接尤其是借助交通工具1中的容纳装置连接在控制单元5上。用户设备10尤其布置在交通工具1中,其中,能够通过位置检测单元检测在交通工具1之内或者在所述交通工具1之外的位置,以便尤其确保用户设备10位于交通工具中。用户设备10例如可以是移动电话、平板电脑、便携式计算机或者用户的智能手表。
[0044]
参照图1阐述按照本发明的方法的实施例。在此由对按照本发明的系统的实施例的上述描述出发。
[0045]
借助环境检测单元6的传感器检测交通工具1的周围环境中的环境数据。环境数据包括关于其它交通参与者、所行驶的交通道路的走向以及关于其它与交通相关的装置、标记或者对象的信息。环境数据尤其包括其它交通参与者相对于自身的交通工具的位置和速度以及自身的交通工具的、尤其是相对于所行驶的交通道路的位置、即例如在确定的行车道上的位置。此外可以包括关于交通工具1的当前行驶情况、例如自身的速度、方向或者地理位置的数据,所述数据例如借助交通工具自身的用于监测行驶参数的传感器和/或定位系统(例如gps)检测。
[0046]
根据所检测的环境数据产生并且借助显示单元3输出环境视图的图形数据。图2a、2b和2c示出了环境视图的示例。
[0047]
在图2a所示的情况中,环境视图包括代表自身的交通工具1的第一操作对象21。沿着行驶方向在自身的交通工具1前方存在其它交通工具,所述其它交通工具在环境视图中由其它操作对象22代表。环境视图还包括代表自身的交通工具1的左斜后方的交通工具的其它操作对象23以及代表自身的交通工具1的右斜前方的交通工具的其它操作对象24。操作对象21、22、23、24在此呈现为交通工具符号。
[0048]
环境视图还包括箭头26,所述箭头示出所述自身的交通工具1的用于进行超车过程的计划的行车道变换。环境视图还包括道路标记25、尤其是标示道路的可行驶区域的边缘的实线和标示各个单独的行车道边界的虚线。显示内容还包括具有符号的操作面27,所述符号将不同的用户输入符号化地表示。这些尤其是:调用导航功能和/或用于激活针对确定路线的自动驾驶功能、驾驶机动的输入和对行驶特性的选择的功能。
[0049]
环境视图在图2a所示的显示内容中在显示窗口30中输出,其中,所述显示内容还包括其它显示窗口31和显示对象32。显示窗口30、31以本身已知的方式设计为显示单元3的显示面的区域并且对应配属于不同的用途。用于环境视图和与交通工具1的自动驾驶功能相关的输出的显示窗口30在所示的实施例中约占可供使用的显示面的一半。其它显示窗口31例如涉及媒体播放的输出和用于显示和管理文本消息的通信器的输出。显示窗口30、31可以以其它本身已知的方式形成并且涉及其它用途。显示对象32在这些示例中包括对当前时间的显示以及用于输出针对自动驾驶功能的消息的符号视图。在所示情况下,方向盘符号化地表示对交通工具1的自动控制并且弯曲的箭头符号化地表示即将进行的超车机动。
[0050]
在图2b所示的情况下,用户在第一操作对象21、即用于自身的交通工具1的符号的区域中触碰触摸屏2,并且产生了选择对象36,所述选择对象在空间上并且根据箭头形状在第一操作对象旁边这样显示,使得可见地显示所述选择对象36与第一操作对象21的对应配属关系。选择对象36包括三个选项33、34、35。第一选项33包括文本显示“下一个休息区”和箭头符号,下一个选项34显示文本“速度”,而另一选项35显示文本“距离”。
[0051]
在其它实施例中,选择对象36可以包括其它选项33、34、35,所述选项尤其包括涉
及自身的交通工具1的驾驶机动和用于自动驾驶功能的设置。
[0052]
用户能够通过操控选项33、34、35、即通过在其中一个选项33、34、35的区域中触碰触摸屏2这样控制交通工具1的自动控制装置,使得执行确定的驾驶机动,或者能够进行确定的设置。因此在选择了选项33“下一个休息区”时,寻找下一个离开当前行驶的路线以进入休息区的可能性,并且驶向该休息区。在操控选项34“速度”之后,产生其它操作对象(未在附图中示出),用户能够根据所述其它操作对象输入新的建议速度或者用户能够在所述其它操作对象中进行针对自动驾驶功能的设置,所述设置产生了自动驾驶功能所追求的更快或者更慢的额定速度。当操控选项35(“距离”)时,与以上针对速度所描述类似地显示输入可能性,在所述输入可能性中可以设置与其它交通参与者、尤其是行驶在前方的交通参与者的期望距离,其中,通过自动驾驶功能确保不会低于确定的安全距离。选择对象36可以备选地或者附加地包括其它驾驶机动和设置参数。
[0053]
显示内容还可以包括信息选择对象,对所述信息选择对象而言规定,在操控所述信息选择对象时显示关于交通工具的状态或者当前行驶情况的确定的信息以及计划的驾驶机动或者设置和当前执行的自动驾驶功能的模式。在这种情况下以本身已知的方式、尤其是借助在显示窗口30内产生的窗口实现信息的输出。备选地或者附加地可以规定,信息输出内容在其它显示窗口31中输出。
[0054]
在图2c所示的情况下,用户操控了其它操作对象22,所述其它操作对象表示在自身的交通工具1前方行驶的其它交通工具。显现其它选择对象37,所述其它选择对象通过其布置并且通过箭头形状对应配属于所述其它操作对象22。该其它选择对象包括具有文本显示“超车”和箭头视图的选项以及具有文本“将消息发送至”的其它选项38。其它选择对象37所包括的选项38、39包括自动驾驶功能、自动驾驶功能的其它功能性和设置参数,它们涉及自身的交通工具1的与其它交通工具、在这种情况下与行驶在前方的其它交通工具相关的行为。所述其它选择对象因此也可以包括来自该领域或者类似领域的其它选项。
[0055]
如果用户在选项38(“超车”)的区域中操控触摸屏2,则通过自动驾驶功能准备进行超车过程。在此尤其在用于自动驾驶功能的存储器中存储控制信号,所述控制信号使得在超车机动能够安全地实现时进行所述超车机动。以此方式确保了,交通工具1的行驶安全地进行。如果用户在其它选项39(“将消息发送至”)的区域中操控触摸屏2,则显示输入可能性,用户能够通过所述输入可能性将消息、尤其是文本消息发送至行驶在前方的交通工具或者其交通工具驾驶员。这种消息可以借助键盘、借助语音输入、通过选择预制的消息或者以其它本身已知的方式输入。
[0056]
在一种实施例中借助交通工具1的触摸屏2实现输出并且所述触摸屏这样布置在中间托架上,使得交通工具1的驾驶员能够进行操作。在另一实施例中,触摸屏2配设有接近检测装置,所述接近检测装置这样设计,使得能够确定用户为了操作触摸屏而从哪个方向接近。这例如可以借助摄像机或者电容式的或者光学的接近识别装置实现。在此通过确定是从驾驶员座椅的方向还是从副驾驶员座椅的方向接近而对用户进行识别。
[0057]
规定了不同用户的不同权限,其中,尤其是交通工具1的驾驶员能够干预自动驾驶功能的激活的功能,以便尤其触发确定的驾驶机动或者设置速度或者距离。如果识别到由副驾驶员进行操作,则该副驾驶员无法选择相应的选项,这能够以本身已知的方式通过变化的视图、例如通过相应的符号、变灰的或者至少部分透明的视图或者以其它方式显示。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips