
 商标分类
商标分类  商标转让
商标转让 
一种对于避让前方压线车辆的偏移控制系统及方法与流程
 2021-02-03 14:02:45|
2021-02-03 14:02:45| 278|
278| 起点商标网
起点商标网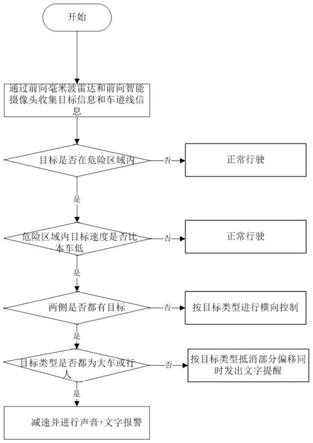
[0001]
本发明涉及汽车智能驾驶辅助技术领域,尤其涉及一种对于避让前方压线车辆的偏移控制系统及方法。
背景技术:
[0002]
近年来,随着特斯拉自动驾驶技术兴起,自动驾驶领域技术被各个主机厂、供应商关注。现在市场较为成熟的量产系统为l2级智能驾驶辅助系统,而从2020年开始,各主机厂商也会逐渐开始l3级自动驾驶,实现部分结构化道路的完全自动驾驶。众所周知,l2级智能驾驶辅助系统主要由前向毫米波雷达和前视智能摄像头融合方案实现,可以实现自适应巡航、前碰撞预警、自动紧急制动、车道偏离预警、车道保持等功能,目前市场量产的可以自动对中行驶的自适应巡航系统仅能保持汽车控制在车道中间行驶,带对中控制的自适应巡航就是依靠摄像头识别的车道宽度结合摄像头安装在车辆的相对位置,算出当前行驶轨迹距离车道中心的距离,然后对eps发送转向角度请求从而进行车辆的对中控制,但如遇到前方本车道或相邻车道的车辆压着本车道车道线行驶时,巡航车辆无法主动避让,还是会按照对中行驶进行控制,可能会贴着临车开过去。在用户使用过程中遇到此场景,难免会感觉信心度不足而导致主动接管车辆,影响用户体验。针对以上情况,从安全性和用户体验的方面考虑,汽车巡航控制过程中,对压线行驶车辆的判断以及主动避让控制尤为重要。
技术实现要素:
[0003]
本发明的目的是提供一种对于避让前方压线车辆的偏移控制系统及方法,汽车巡航控制过程中,能对压线行驶车辆的判断以及主动避让,不仅能保证驾驶的安全性,还能提升用户体验。
[0004]
为实现上述目的,本发明提供了一种对于避让前方压线车辆的偏移控制方法,包括以下步骤:
[0005]
(s1)本车巡航过程中,获取前方目标信息和车道线信息并将两者进行融合,判断目标是否在危险区域内,若是,则执行步骤(s2);否则,则正常行驶;
[0006]
(s2)判断危险区域内目标速度是否比本车低,若是,则执行步骤(s3);否则,则正常行驶;
[0007]
(s3)判断本车的两侧是否都有目标,若是,则执行步骤(s4);否则,则按目标类型进行横向控制;其中,目标类型包括小车、大车、行人和两轮车;
[0008]
(s4)判断目标类型是否都为大车或行人,若是,则减速并进行声音和文字报警;否则,则按目标类型抵消部分偏移同时发出文字提醒。
[0009]
进一步,所述危险区域的取值范围为[-10cm,40cm],其中,
“-”
代表在本车道线的外侧。
[0010]
进一步,在步骤(s3)和步骤(s4)中,根据不同的目标类型,定义本车处于以下5种场景的危险目标作出横向控制:
[0011]
场景一:
[0012]
当单侧危险区域内有小车时,向另一侧横向移动30cm;
[0013]
场景二:
[0014]
当单侧危险区域内有大车时,向另一侧横向移动60cm;其中,所述大车包括货车、公交车、客车;
[0015]
场景三:
[0016]
当单侧危险区域内有行人或两轮车时,向另一侧横向移动60cm;
[0017]
场景四:
[0018]
当双侧危险区域内都有目标且至少有一侧为小车时,根据目标类型横向位移需求进行部分抵消;
[0019]
场景五:
[0020]
当双侧危险区域内都为大车或行人时,对中行驶。
[0021]
进一步,目标信息包括横纵向速度、横纵向距离、行驶轨迹和目标类型;车道线信息包括前方车道线的轨迹、车道线宽度识别。
[0022]
进一步,还执行以下步骤:若判断目标类型的横向距离跨越本车道线内侧阈值后,本车需准确识别到前车并将前车判定为本车道目标,并按本车道目标的控制方式进行纵向速度控制。
[0023]
本发明还提供一种对于避让前方压线车辆的偏移控制系统,包括:
[0024]
本车状态模块,用于获取本车的状态、车速、方向盘转角、油门大小和制动压力;
[0025]
前向毫米波雷达模块,用于探测目标信息;
[0026]
前视智能摄像头模块,用于识别车道线信息;
[0027]
显示模块,用于显示对应的文字信息;
[0028]
转向模块、动力模块、制动模块和ecu控制模块;所述本车状态模块、前向毫米波雷达模块、前视智能摄像头模块、控制转向模块、动力模块和制动模块均与ecu控制模块连接;
[0029]
所述系统被配置为能执行所述的对于避让前方压线车辆的偏移控制方法的步骤。
[0030]
本发明与现有技术相比较具有以下优点:
[0031]
本发明的对于避让前方压线车辆的偏移控制系统及方法,能够根据不同的目标类型进行不同程度的横向偏移避让,能够保证车辆行驶的安全性的同时,还能够提升用户的体验,且本方案无须新增硬件配置,容易实施。
附图说明
[0032]
图1为本发明对于避让前方压线车辆的偏移控制方法的流程图;
[0033]
图2为本发明对于避让前方压线车辆的偏移控制系统的结构示意图。
[0034]
图中:
[0035]
1-本车状态模块;2-前向毫米波雷达模块;3-前视智能摄像头模块;4-ecu控制模块;5-转向模块;6-动力模块;7-制动模块;8-显示模块。
具体实施方式
[0036]
下面结合附图对本发明的具体实施方式作进一步说明。
[0037]
参见图1所示,本实施例公开了一种对于避让前方压线车辆的偏移控制方法,包括以下步骤:
[0038]
(s1)本车巡航过程中,获取前方目标信息和车道线信息并将两者进行融合,判断目标是否在危险区域内,若是,则执行步骤(s2);否则,则正常行驶;
[0039]
(s2)判断危险区域内目标速度是否比本车低,若是,则执行步骤(s3);否则,则正常行驶;
[0040]
(s3)判断本车的两侧是否都有目标,若是,则执行步骤(s4);否则,则按目标类型进行横向控制;其中,目标类型包括小车、大车、行人和两轮车;
[0041]
(s4)判断目标类型是否都为大车或行人,若是,则减速并进行声音和文字报警;否则,则按目标类型抵消部分偏移同时发出文字提醒。其中前者的文字报警比后者的文字提醒更为强烈。
[0042]
在本实施例中,还执行以下步骤:若判断目标类型的横向距离跨越本车道线内侧阈值后,本车需准确识别到前车并将前车判定为本车道目标,并按本车道目标的控制方式进行纵向速度控制。
[0043]
在本实施例中,所述危险区域的取值范围为[-10cm,40cm],其中,
“-”
代表在本车道线的外侧。此时,-10cm为车道线外侧阈值,40cm为车道线内侧阈值。
[0044]
在本实施例中,在步骤(s3)和步骤(s4)中,根据不同的目标类型,定义本车处于以下5种场景的危险目标作出横向控制:
[0045]
场景一:
[0046]
当单侧危险区域内有小车时,向另一侧横向移动30cm;
[0047]
场景二:
[0048]
当单侧危险区域内有大车时,向另一侧横向移动60cm;其中,所述大车包括货车、公交车和客车;
[0049]
场景三:
[0050]
当单侧危险区域内有行人或两轮车时,向另一侧横向移动60cm;
[0051]
场景四:
[0052]
当双侧危险区域内都有目标且至少有一侧为小车时,根据目标类型横向位移需求进行部分抵消;
[0053]
场景五:
[0054]
当双侧危险区域内都为大车或行人时,对中行驶。以上情景分类是按我们作为驾驶员时的操作习惯,我们会对不同的目标进行不同程度的横向偏移避让,并且按l2级智能驾驶辅助的功能安全要求,此避让必须在本车道内进行,不可超出车道进行换道,避让的横向距离不可以使本车达到另一侧的危险域内。
[0055]
在本实施例中,目标信息包括横纵向速度、横纵向距离、行驶轨迹和目标类型;车道线信息包括前方车道线的轨迹、车道线宽度识别。
[0056]
参见图2所示,本实施例公开了一种对于避让前方压线车辆的偏移控制系统,执行上述的对于避让前方压线车辆的偏移控制方法,包括:
[0057]
本车状态模块1,用于获取本车的状态、车速、方向盘转角、油门大小和制动压力;
[0058]
前向毫米波雷达模块2,用于探测目标信息;
[0059]
前视智能摄像头模块3,用于识别车道线信息;
[0060]
显示模块8,用于显示对应的文字信息;
[0061]
转向模块5、动力模块6、制动模块7和ecu控制模块4;所述本车状态模块1、前向毫米波雷达模块2、前视智能摄像头模块3、控制转向模块5、动力模块6和制动模块7均与ecu控制模块4连接;
[0062]
所述系统被配置为能执行上述的对于避让前方压线车辆的偏移控制方法的步骤。
[0063]
车辆巡航过程中,ecu控制模块4将接收到目标信息和车道线信息进行融合,判断出前方各个目标的类型和所在位置距离本车前方轨迹的危险区域的横向距离。当前方有目标出现在本次行驶轨迹的危险区域内时,ecu控制模块4需要根据目标类型要求的横向位移距离发出对应的角度请求到转向模块5进行转向。其中,当处于场景四时ecu控制模块4需发出文字提醒请求给显示模块8,显示模块8按照商定的需求显示对应文字信息。当处于场景五时,ecu控制器4除了不请求转向模块5进行转向以外,还需要同步控制动力模块6和制动模块7进行减速控制。同时发出文字和声音提醒请求给显示模块8,显示模块8按照商定的需求显示文字信息和进行声音报警。
[0064]
本发明的对于避让前方压线车辆的偏移控制系统及方法,能够根据不同的目标类型进行不同程度的横向偏移避让,能够保证车辆行驶的安全性的同时,还能够提升用户的体验,且本方案无须新增硬件配置,容易实施。
[0065]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签:

 热门咨询
热门咨询




tips