
 商标分类
商标分类  商标转让
商标转让 
乘员保护装置的制作方法
 2021-02-03 14:02:49|
2021-02-03 14:02:49| 246|
246| 起点商标网
起点商标网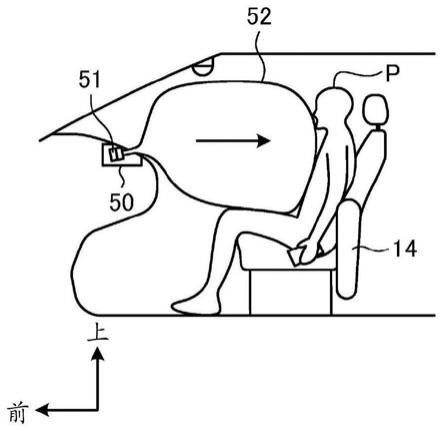
[0001]
本发明涉及乘员保护装置。
背景技术:
[0002]
为了保护乘员不受碰撞等影响,汽车等车辆中作为乘员保护装置装备有主气囊装置。
[0003]
该气囊装置通常由冲击传感器、充气机、气囊、控制装置等构成。当因前面碰撞等使冲击传感器检测到冲击时,气囊装置将检测信号输出到控制装置,控制装置将工作信号传送到充气机,充气机产生气体并将其输送到气囊。而且,气囊通过从充气机输送的气体瞬时膨胀,在乘员的前方展开。由此,气囊通过内部的气压而接住因冲击而向前方移动的乘员的身体,一边吸收该运动能量一边收缩。这样,通过气囊缓和汽车前面碰撞等中的碰撞冲击引起的乘员的激烈的前方移动,确保乘员的安全。
[0004]
另一方面,近年来,对自动驾驶的技术进行了研究。在这种自动驾驶车辆中,与驾驶员等乘员的意思无关地控制车辆的行驶状态。因此,提出有与自动驾驶对应的车辆的乘员保护装置。在该车辆的乘员保护装置中,具有在乘员的上身前展开的前气囊,在与移动到比就座位置靠前的乘员的上身的肩部抵接的部位形成有肩部可以进入的肩部支承凹部。由此,即使在车辆的自动驾驶中就座于座椅的乘员的上身在碰撞前从座椅的就座位置向前移动,也能够在肩部支承凹部中支承该上身的肩部,保护乘员。另外,在该车辆的乘员保护装置中,从肩部支承凹部朝向车宽方向的一方,形成一方侧与另一方侧相比靠后的倾斜面。由此,能够通过前气囊的倾斜面支承以另一方的肩部靠前而倾斜的姿势向前移动的上身整体,能够以稳定的状态支承,并在该状态下吸收冲击(参照专利文献1)。
[0005]
然而,当自动驾驶真正普及时,在乘员的搭乘状态下自由度增加。因此,例如,即使就座于驾驶席,也可以考虑在车辆的行驶中手持便携终端等。另外,甚至现在,也可以考虑在驾驶席以外的座位,在车辆的行驶中手持便携终端等。另外,还有在乘员将臂放在扶手上的情况。
[0006]
现有技术文献
[0007]
专利文献
[0008]
专利文献1:日本特开2018-052441号公报
技术实现要素:
[0009]
发明要解决的技术问题
[0010]
但是,在前气囊朝向乘员展开时,在乘员持有便携终端等或乘员将臂放在扶手上时,乘员的臂等夹在前气囊和乘员的上身之间,而难以得到最佳的乘员保护。
[0011]
另外,如果在乘员的体重作用于扶手上的情况下,随便降下扶手,则会干扰乘员的姿势,有可能产生从座位座椅脱落等不测的事态。
[0012]
本发明是为了解决这种现有的问题而研发的,其目的在于,提供一种即使在乘员
将臂放在扶手上的情况下也能够进行最佳的乘员保护的乘员保护装置。
[0013]
用于解决问题的技术方案
[0014]
本发明的车辆的乘员保护装置具备:碰撞预测单元,其预测车辆的碰撞;主气囊,其在通过所述碰撞预测单元预测到车辆的碰撞时,从车辆的前方朝向乘员展开;乘员重心检测装置,其检测乘员的重心位置;扶手移动装置(
アームレスト
可動装置),其使扶手移动;以及展开控制单元,其在通过所述碰撞预测单元预测到车辆的碰撞时,基于通过所述乘员重心检测装置检测到的乘员的重心位置,使所述扶手移动装置将所述扶手向上方移动并将乘员的重心引导到适当范围,之后使所述扶手坠落,然后展开所述主气囊。
[0015]
另外,本发明涉及的车辆的乘员保护装置也可以的是,所述展开控制单元仅使左右一对扶手中通过所述乘员重心检测装置判定为乘员的重心偏置的一侧的扶手向上方移动,并将乘员的重心引导到适当范围。
[0016]
另外,本发明涉及的车辆的乘员保护装置也可以的是,所述展开控制单元在所述扶手向上方移动后,通过所述乘员重心检测装置检测到乘员的重心移动到适当范围后,使所述扶手坠落。
[0017]
另外,本发明涉及的车辆的乘员保护装置也可以的是,所述展开控制单元在所述扶手向上方移动后,在规定的时间通过所述乘员重心检测装置没有检测到乘员的重心移动到适当范围的情况下,不使所述扶手坠落。
[0018]
另外,本发明涉及的车辆的乘员保护装置也可以的是,所述乘员重心检测装置具有摄像头、载重传感器和压力传感器中的任一种。
[0019]
另外,本发明涉及的车辆的乘员保护装置也可以的是,所述展开控制单元在通过所述乘员重心检测装置检测到乘员的重心位置处于规定的位置的情况下,不使所述扶手移动,而展开所述主气囊。
[0020]
发明效果
[0021]
根据本发明,能够提供一种即使在乘员将臂放在扶手上的情况下也能够进行最佳的乘员保护的乘员保护装置。
附图说明
[0022]
图1(a)-(b)是表示具备本发明实施方式的乘员保护装置的车辆的一部分的概略的剖视图。
[0023]
图2是本发明实施方式的乘员保护装置的概略方框图。
[0024]
图3(a-1)-(c-2)是表示扶手的移动及气囊袋体的展开的侧视图及主视图。
[0025]
图4是表示乘员保护装置的操作概述的流程图。
[0026]
图5(a-1)-(c-2)是表示在乘员的姿势没有矫正的情况下,扶手的移动及气囊袋体的展开的侧视图及主视图。
[0027]
符号说明
[0028]
1车辆、3地板、4车顶、5仪表板、10座位座椅、11座椅坐垫、12座椅靠背、13头枕、14扶手、14l左扶手、14r右扶手、31车载摄像头、32雷达、33载重传感器、34压力传感器、50主气囊装置、51主用充气机、52主气囊袋体、80扶手移动装置、101乘员保护装置、110控制部
具体实施方式
[0029]
以下,参照附图对本发明的实施方式进行说明。
[0030]
(第一实施方式)
[0031]
图1(a)-(b)是表示具备本发明实施方式的乘员保护装置的车辆的一部分的概略的剖视图。另外,图2是本发明实施方式的乘员保护装置的概略方框图。另外,图3(a-1)-(c-2)是表示本实施方式的乘员保护装置工作时的扶手的移动及气囊袋体的展开的侧视图及主视图。另外,图4是表示乘员保护装置的操作概述的流程图。另外,图5(a-1)-(c-2)是表示即使操作扶手,乘员的姿势也没有矫正时的扶手的移动及气囊袋体的展开的侧视图及主视图。
[0032]
(车辆1的结构)
[0033]
如图1(a)-(b)所示,车辆1的乘员室在下部设置有地板3,在上部设置有车顶4。另外,在地板3上配备座位座椅10。另外,车辆1中具备后述的乘员保护装置101。
[0034]
座位座椅10是乘坐于车辆1的乘员p就座的部件。另外,座位座椅10具备:从乘员p的臀部支承大腿部的座椅坐垫11(座部)、可斜躺地设置的座椅靠背12(背靠部)、支承乘员p的头部的头枕13(头部)、支承乘员p的前臂或肘等的扶手14(支肘部)。另外,扶手14具有左右一对,即在座椅坐垫11的左上方具有左扶手14l,在座椅坐垫11的右上方具有右扶手14r。
[0035]
另外,扶手14在座椅靠背12的两外侧从乘员p坐在座椅坐垫11时大致肘的高度的位置向车辆1的前方大致水平地延设。然后,如后述,扶手14以与座椅靠背12的安装位置为中心可上下转动。
[0036]
(乘员保护装置101的结构)
[0037]
如图2所示,乘员保护装置101具备:车载摄像头31、雷达32、载重传感器33、压力传感器34、主气囊装置50、扶手移动装置80、控制部110。此外,主气囊装置50设置于仪表板5。
[0038]
另外,控制部110如后述基于从车载摄像头31及雷达32输入的信息,检测车辆1的碰撞及碰撞预测,同时还具备控制设置于主气囊装置50的气囊袋体的展开的气囊展开控制单元(以下,称为acu)的功能。此外,控制部110也可以设为控制车辆1的整体的车辆控制装置(以下,称为ecu)的一部分。
[0039]
(车载摄像头31)
[0040]
车载摄像头31能够拍摄车辆1的外部及内部。例如,车载摄像头31拍摄车辆1的周边环境,具体而言,拍摄车辆1的前方、后方及侧方。另外,车载摄像头31拍摄车内,以清楚在座位座椅10就座的乘员p的就座状态,特别是清楚乘员p的臂及手的位置的方式进行拍摄。而且,将拍摄的图像信息输送到控制部110,并在控制部110的ram中记录图像信息,并且将图像信息在控制部110中进行解析。由此,控制部110可以实时及事后识别车辆1的周围的状况(车外的状况)。另外,控制部110可以实时及事后识别车内的状况,特别是可以识别乘员p的状态。此外,在此所说的乘员p的状态特别是估计乘员p的臂及手的位置。另外,控制部110通过取得的图像信息,也能够判定乘员p的重心位置。
[0041]
(雷达32)
[0042]
雷达32发射电波探测障碍物等物体,测定距物体的距离和方位。另外,雷达32安装于车辆1的前保险杠及后保险杠,能够进行车辆1的前方监视、侧方监视、后方监视等。而且,监视信息输入到控制部110,在控制部110的ram记录监视信息,并且将监视信息在控制部
110中进行解析。由此,控制部110能够实时及事后识别车辆1的周围的状况。
[0043]
此外,在本实施方式中具备车载摄像头31、雷达32,使用双方的信息进行碰撞预测,但不限于此,也可以只使用任意一方,另外,也可以使用其它的装置。另外,在本实施方式中使用车载摄像头31的图像信息取得车内的状况即乘员p的状态的信息,但不限于此,也可以使用人感传感器等。
[0044]
(载重传感器33)
[0045]
载重传感器33在座位座椅10的座椅坐垫11及扶手14上设置有多个,能够检测作用于各自上的负荷。例如,载重传感器33检测座椅坐垫11左前方、右前方、左后方、右后方、以及中央部的5个部位、左扶手14l前方及后方的2个部位、右扶手14r前方及后方的2个部位、共计9个部位处相应作用的负荷。
[0046]
而且,检测到的各检测值被输入到控制部110,并在控制部110的ram中记录各检测值,并且将负荷信息在控制部110进行解析。由此,控制部110能够判定乘员p的就座状态、具体而言,判定乘员p的重心位置。
[0047]
(压力传感器34)
[0048]
压力传感器34在座位座椅10的座椅坐垫11、座椅靠背12以及扶手14上设置有多个,能够检测作用于各自上的压力。例如,压力传感器34检测在座椅坐垫11前后左右各3列的9个部位、在座椅靠背12上下左右各3列的9个部位、在左右的扶手14前后各3处的6个部位的、共计24个部位处相应作用的压力。
[0049]
而且,检测到的各检测值被输入到控制部110,在控制部110的ram中记录各检测值,并且将压力信息在控制部110中进行解析。由此,控制部110能够判定乘员p的就座状态、具体而言乘员p的重心位置。
[0050]
此外,在本实施方式中,具备:车载摄像头31、载重传感器33、压力传感器34,在各自中能够判定乘员p的重心位置,但不需要具备所有这些的结构,可以仅使用任一个,另外,也可以使用其它装置。另外,在本实施方式中,载重传感器33及压力传感器34使用多个传感器,但不局限于此,最低限只要能够检测乘员p的重心是靠右还是靠左即可。
[0051]
(主气囊装置50)
[0052]
主气囊装置50受控制部110控制,保护乘员p不受碰撞的冲击影响。另外,主气囊装置50具有主用充气机51、主气囊袋体52(参照图3(a-1)-(c-2))。
[0053]
(主用充气机51)
[0054]
主用充气机51通过控制部110基于车辆1的碰撞检测或碰撞预测产生的工作信号,点燃火药,利用燃烧引起的化学反应产生气体。另外,在主用充气机51产生的气体被压入主气囊袋体52。
[0055]
(主气囊袋体52)
[0056]
主气囊袋体52是通过主用充气机51压入气体的袋体,非工作时折叠得较小。另外,主气囊袋体52在从主用充气机51压入气体时,从仪表板5向座位座椅10的方向膨胀展开,缓和车辆1的碰撞对乘员p的头部及胸部等的冲击。即,主气囊袋体52在通过控制部110预测到车辆1的碰撞时,从车辆1的前方朝向乘员p展开。
[0057]
(扶手移动装置80)
[0058]
扶手移动装置80被控制部110控制,使扶手14移动。具体而言,扶手移动装置80通
过控制部110的控制使左扶手14l或右扶手14r中的任一方以与座椅靠背12的安装部为中心使前端部朝向上方旋转(以下,称为上方旋转)。另外,扶手移动装置80通过控制部110的控制使左扶手14l及右扶手14r双方以与座椅靠背12的安装部为中心,将前端部朝向下方旋转(以下,称为下方旋转)。
[0059]
此外,控制部110在检测到车辆1的碰撞预测时,使扶手移动装置80将乘员p的重心作用的一侧的左扶手14l或右扶手14r向上方旋转,在乘员p的重心位置的偏置解除后,使扶手移动装置80将左扶手14l及右扶手14r双方向下方旋转。
[0060]
(控制部110)
[0061]
控制部110用于控制乘员保护装置101的动作。另外,控制部110具备作为中央运算处理装置的cpu(central processing unit,中央处理单元)、进行cpu执行的控制程序、数据表、各指令及数据等的存储的rom(read only memory,只读存储器)、暂时存储数据的ram(random access memory,随机存取存储器)、由可重写的非易失性的内存构成的eeprom(electrically erasable and programmable read only memory,电可擦且可编程只读存储器)及输入输出接口电路,总括乘员保护装置101的控制。
[0062]
另外,控制部110经由输入输出接口电路与车载摄像头31、雷达32、载重传感器33、压力传感器34、主气囊装置50、扶手移动装置80及未图示的ecu连接。
[0063]
而且,控制部110基于从车载摄像头31及雷达32输入的信息,进行车辆1的碰撞预测及碰撞判定。
[0064]
此外,控制部110不限于从车载摄像头31、雷达32输入的信息,也可以使用加速度传感器(g传感器)、距离传感器、冲击传感器(压力传感器)等,基于从这些装置输入的信息,进行碰撞预测及碰撞判定。
[0065]
另外,控制部110基于从车载摄像头31输入的信息,确定乘员p的状态,具体而言,确定乘员p的臂的位置。
[0066]
另外,控制部110基于从车载摄像头31、载重传感器33、压力传感器34输入的信息确定乘员p的重心位置。
[0067]
而且,控制部110在预测到车辆1的碰撞时,使扶手移动装置80移动,将扶手14向上方旋转或向下方旋转,进行乘员p的臂拨开(腕払
い
)后,展开主气囊袋体52。
[0068]
(乘员保护装置101的动作)
[0069]
接着,对这种乘员保护装置101的动作进行说明。
[0070]
图3(a-1)-(c-2)是表示扶手14的移动及主气囊袋体52的展开的侧视图及主视图。另外,图4是表示乘员保护装置101的操作概述的流程图。
[0071]
乘员保护装置101通过控制部110每隔规定的周期定期地进行图4所示的控制处理。
[0072]
控制部110在控制处理中,首先,进行碰撞预测处理(步骤s101)。具体而言,控制部110基于从车载摄像头31及雷达32输入的信息,进行车辆1的碰撞预测。另外,控制部110除该碰撞预测以外,还进行车辆1的碰撞判定处理。此外,控制部110在检测出车辆1的碰撞的情况下,也可以进行与以下的碰撞预测时的处理同样的处理,但期望进行碰撞时的处理。在该碰撞时的处理中,例如,不进行扶手14的移动,仅使主气囊袋体52展开。
[0073]
接着,控制部110判定是否检测到车辆1的碰撞预测(步骤s102)。即,控制部110在
上述碰撞预测处理中判定是否预测到车辆1的碰撞。
[0074]
控制部110在判定出预测到碰撞的情况下(步骤s102中判定为是),使处理进入步骤s103,在未判定出预测到碰撞(步骤s102中判定为否),即未预测有碰撞的情况下,结束本控制处理。
[0075]
控制部110在检测到车辆1的碰撞预测时,进行乘员p的重心判定处理(步骤s103)。具体而言,控制部110基于从载重传感器33输入的信息,检测就座于座位座椅10的乘员p的重心的位置。此外,如上,该乘员p的重心位置的检测也可以基于从车载摄像头31及压力传感器34输入的信息,检测就座于座位座椅10的乘员p的重心的位置。
[0076]
接着,控制部110判定乘员p的重心是否偏置(步骤s104)。具体而言,控制部110判定上述检测到的乘员p的重心的位置是否距座位座椅10的左右的中心处于规定的范围内。
[0077]
控制部110在判定为乘员p的重心偏置的情况下(步骤s104中判定为是),使处理进入步骤s105,在判定为乘员p的重心未偏置的情况下(步骤s104中判定为否),使处理进入步骤s108。
[0078]
控制部110在判定为乘员p的重心偏置的情况下,通过扶手移动装置80使重心作用的一侧的左扶手14l或右扶手14r向上方旋转(步骤s105)。具体而言,控制部110基于乘员p的重心的偏置方向,确定可使之移动的左扶手14l或右扶手14r,对扶手移动装置80输出使所确定的左扶手14l或右扶手14r向上方旋转的工作信号。由此,能够将向一方偏置的乘员p向中心方向扶起,将乘员p的重心引导到适当范围。
[0079]
接着,控制部110判定乘员p的重心是否移动到适当范围(步骤s106)。具体而言,控制部110在扶手14向上方移动后,再次从载重传感器33取得检测信号,检测乘员p的重心位置,判定检测到的乘员p的重心的位置是否距座位座椅10的左右的中心处于规定的范围内。此外,该情况下,取得重心位置的检测信号也不局限于载重传感器33,也可以取得车载摄像头31及压力传感器34的检测信号。
[0080]
控制部110在判定为乘员p的重心移动到适当范围的情况下(步骤s106中判定为是),使处理进入步骤s108,在判定为乘员p的重心没有移动到适当范围的情况下(步骤s106中判定为否),使处理进入步骤s107。
[0081]
控制部110在判定为乘员p的重心没有移动到适当范围的情况下,判定从扶手14的移动是否经过了规定的时间(步骤s107)。控制部110在判定为经过了规定的时间的情况下(步骤s107中判定为是),使处理进入步骤s109,在判定为没有经过规定的时间的情况下(步骤s107中判定为否),返回步骤s105,重复上述处理。
[0082]
控制部110在判定为乘员p的重心从开始就没有偏置(步骤s104中判定为否)或判定为通过扶手14的移动使乘员p的重心移动到适当范围(步骤s106中判定为是)的情况下,进行使扶手14坠落的处理(步骤s108)。具体而言,控制部110对扶手移动装置80输送使左扶手14l及右扶手14r双方向下方旋转的工作信号。由此,能够使放在扶手14上的乘员p的臂向下方落下。
[0083]
接着,控制部110进行使主气囊袋体52展开的处理(步骤s109)。具体而言,控制部110对主气囊装置50的主用充气机51发送工作信号,点火,产生气体。主气囊装置50在主用充气机51产生气体时,将气体压入到主气囊袋体52中,主气囊袋体52朝向乘员p的上身向后方展开。
[0084]
另一方面,如图5(a-1)-(c-2)所示,在乘员p的姿势没有矫正的情况下,不进行扶手14的下方旋转。
[0085]
具体而言,首先,控制部110通过扶手移动装置80使重心作用的一侧的扶手14向上方旋转(步骤s105)。然后,控制部110在即使经过规定时间,乘员p的重心也没有移动到适当范围的情况下(步骤s106、步骤s107中判定),不进行扶手14的下方旋转(不进行步骤s108的处理),而展开主气囊袋体52(步骤s109)。
[0086]
此外,本实施方式中,即使使扶手14向上方旋转,在乘员p的重心没有移动到适当范围的情况下也保持扶手14向上方旋转,但不局限于此,也可以使扶手14返回到原来的位置。通过这样,例如,即使通过扶手14的向上方旋转而使手来到脸的附近,也可以通过将扶手14返回原来的位置,使手的位置避开脸,在主气囊袋体52展开时,能够防止手或手持有的异物(例如,便携终端等)与脸或头部接触,能够适当地进行乘员保护。
[0087]
另外,在本实施方式中,扶手移动装置80使扶手14向上方旋转及向下方旋转,但不局限于此,也可以使扶手14在垂直方向上下平行移动。另外,也可以使扶手14向内侧上方移动,或向外侧下方移动。另外,也可以使扶手14向左右方向外侧旋转或移动。
[0088]
另外,在本实施方式中,扶手移动装置80使扶手14移动或旋转,但不局限于此,也可以从扶手14展开气囊等,进行乘员p的姿势矫正或臂的甩落等。
[0089]
如上,本实施方式的乘员保护装置101使扶手14暂时向上方旋转后向下方旋转,甩落乘员p的臂,朝向乘员p的上身展开主气囊袋体52,因此,能够在矫正乘员p的姿势之后甩落臂,并在甩落乘员p的臂时,能够防止干扰乘员p的姿势,或从座位座椅10脱落等,并能够最佳地保护乘员p。
[0090]
另外,本实施方式的乘员保护装置101在即使使扶手14向上方旋转,乘员p的姿势也没有矫正的情况下,不进行扶手14的下方旋转,而展开主气囊袋体52,因此,能够适当地保护乘员p,而不会胡乱干扰乘员p的姿势。
[0091]
此外,在本实施方式中,车载摄像头31、载重传感器33、压力传感器34构成本申请的乘员重心检测装置。
[0092]
另外,在本实施方式中,控制部110构成本申请的碰撞预测单元、展开控制单元。
[0093]
另外,在本实施方式中,主气囊袋体52构成本申请的主气囊。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 车载摄像头

 热门咨询
热门咨询




tips