
 商标分类
商标分类  商标转让
商标转让 
车载设备控制装置的制作方法
 2021-02-03 14:02:17|
2021-02-03 14:02:17| 276|
276| 起点商标网
起点商标网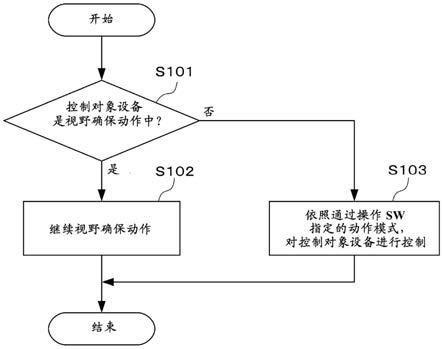
[0001]
本发明涉及控制搭载于车辆的车载设备的车载设备控制装置。
背景技术:
[0002]
研究对车辆进行自动驾驶控制的技术。在进行这样的自动驾驶控制的情况下,为了易于正确地辨识车辆的行进方向的状况,根据车辆的周围的状况,还控制前大灯或者雨刮器这样的车载设备。
[0003]
有时切换自动驾驶控制和驾驶员对车辆进行驾驶控制的手动驾驶控制。在这样的情况下,要求在从自动驾驶控制切换到手动驾驶控制之后,控制车载设备以使驾驶员能够适当地驾驶车辆。因此,提出了如下技术,在自动驾驶控制的执行中并且室内灯是点亮状态的情况下用驾驶控制部将车辆的驾驶从自动驾驶切换到手动驾驶时,使前照灯照射的预定区域的明亮度比在车辆的驾驶是手动驾驶的情况下前照灯照射的预定区域的明亮度即通常光度增加预先决定的预定时间(例如参照专利文献1)。
[0004]
现有技术文献
[0005]
专利文献
[0006]
专利文献1:日本特开2018-24351号公报
技术实现要素:
[0007]
但是,无论室内灯是否点亮,优选的是,在从自动驾驶控制切换到手动驾驶控制时,使得驾驶员易于视觉辨认车辆周围的状况。
[0008]
因此,本发明的目的在于提供一种在车辆的驾驶控制从自动驾驶控制切换到手动驾驶控制时,能够抑制驾驶员难以视觉辨认车辆的周围的车载设备控制装置。
[0009]
根据一个实施方式,提供车载设备控制装置。该车载设备控制装置具有控制部,该控制部在车辆的驾驶控制即将从自动驾驶控制切换到手动驾驶控制之前的、前大灯、雨刮器以及空调装置中的任意设备执行的动作模式是与确保车辆的驾驶员的视野的视觉确保动作相当的动作模式的情况下,无论通过用于设定该设备的动作的操作部指定的所述设备的动作模式如何,在车辆的驾驶控制从自动驾驶控制切换到手动驾驶控制之后也使该设备继续视觉确保动作。
[0010]
在该车载设备控制装置中,优选为前大灯、雨刮器以及空调装置中的任意设备是前大灯,控制部在车辆的驾驶控制从自动驾驶控制切换到手动驾驶控制之后,由搭载于车辆的照度传感器测定的照度为预定的阈值以上时,将前大灯的动作模式变更为通过操作部指定的动作模式。
[0011]
或者,在该车载设备控制装置中,优选为前大灯、雨刮器以及空调装置中的任意设备是雨刮器,控制部在车辆的驾驶控制从自动驾驶控制切换到手动驾驶控制之后,由搭载于车辆的速度传感器测定的车辆的速度为预定速度以下,并且,车辆的变速杆的位置是车辆的动力不被传递到车辆的车轮的位置的情况下,或者,在由搭载于车辆的雨传感器测定
的雨量为预定的阈值以下时,将雨刮器的动作模式变更为通过操作部指定的动作模式。
[0012]
或者另外,在该车载设备控制装置中,优选为前大灯、雨刮器以及空调装置中的任意设备是空调装置,控制部在从车辆的驾驶控制从自动驾驶控制切换到手动驾驶控制时起经过预定时间时,将空调装置的动作模式变更为通过操作部指定的动作模式。
[0013]
或者另外,在该车载设备控制装置中,优选为前大灯、雨刮器以及空调装置中的任意设备是前大灯,控制部在车辆的驾驶控制从自动驾驶控制切换到手动驾驶控制之后,从在最近的一定期间内由搭载于车辆的摄像部得到的时间序列的多个图像的各个检测对向车以及对向车的前大灯的点亮状况,在一定期间内的点亮前大灯的对向车的数量相对检测到的对向车的总数的比为预定比例以下时,将前大灯的动作模式变更为通过操作部指定的动作模式。
[0014]
或者另外,在该车载设备控制装置中,优选为前大灯、雨刮器以及空调装置中的任意设备是雨刮器,控制部在车辆的驾驶控制从自动驾驶控制切换到手动驾驶控制之后,从在最近的一定期间内由搭载于车辆的摄像部得到的时间序列的多个图像的各个检测对向车以及对向车的雨刮器的动作状况,在一定期间内的雨刮器动作的对向车的数量相对检测到的对向车的总数的比为预定比例以下时,将雨刮器的动作模式变更为通过操作部指定的动作模式。
[0015]
根据其他实施方式,提供车载设备控制装置。该车载设备控制装置具有控制部,该控制部在针对车辆的自动驾驶控制的执行中,判定通过用于设定前大灯以及雨刮器中的任意设备的动作的操作部指定的设定动作模式和该设备执行的执行动作模式是否一致,在设定动作模式和执行动作模式不同的情况下,经由通知部对车辆的驾驶员通知设定动作模式和执行动作模式不同。
[0016]
本发明所涉及的车载设备控制装置起到能够抑制在车辆的驾驶控制从自动驾驶控制切换到手动驾驶控制时驾驶员难以视觉辨认车辆的周围的情况这样的效果。
附图说明
[0017]
图1是安装车载设备控制装置的车辆控制系统的概略结构图。
[0018]
图2是用于操作前大灯的操作开关的开关位置的说明图。
[0019]
图3是用于操作雨刮器的操作开关的开关位置的说明图。
[0020]
图4是作为车载设备控制装置的一个实施方式的body-ecu的硬件结构图。
[0021]
图5是从自动驾驶控制切换到手动驾驶控制时的车载设备控制处理的动作流程图。
[0022]
图6是示出与前大灯有关的操作开关的开关位置、照度、应用的驾驶控制、以及前大灯的控制状态的关系的一个例子的图。
[0023]
图7是与前大灯有关的视野确保动作结束判定处理的动作流程图。
[0024]
图8是示出与雨刮器有关的操作开关的开关位置、雨量、应用的驾驶控制、以及雨刮器的控制状态的关系的一个例子的图。
[0025]
图9是与雨刮器有关的视野确保动作结束判定处理的动作流程图。
[0026]
(符号说明)
[0027]
1:车辆控制系统;11:照相机;12:gps接收机;13:存储装置;14:人机接口(hmi);
15:传感器;16、16a~16c:操作开关;17:行驶控制用电子控制装置(行驶ecu);18:车体控制用电子控制装置(body-ecu);31:通信接口;32:存储器;33:处理器;100:车辆。
具体实施方式
[0028]
以下,参照附图,说明车载设备控制装置。该车载设备控制装置控制前大灯、雨刮器以及空调装置中的至少任意一个(以下有时称为车载设备或者控制对象设备)。而且,该车载设备控制装置在进行自动驾驶控制时,在控制对象设备执行用于确保驾驶员的视野的动作(以下称为视野确保动作)的情况下,即使从自动驾驶控制切换到手动驾驶控制,也与通过与该控制对象设备对应的操作部指定的、该控制对象设备的动作模式无关地,使视野确保动作继续。由此,该车载设备控制装置防止在从自动驾驶控制切换到手动驾驶控制时驾驶员无法对车辆的周围进行视觉辨认的情形。此外,视觉确保动作是指,例如,关于前大灯是指点亮来对车辆的前方区域进行照明的动作,关于雨刮器是指擦拭前窗玻璃的动作,关于空调装置是指去除前窗玻璃的雾的除霜动作。另外,在视觉确保动作的继续中,包括不降低视野确保动作的执行等级而维持自动驾驶控制时的执行等级的情况。例如,在自动驾驶控制时,在雨刮器低速动作的情况下,即使通过操作部指定的动作模式成为使雨刮器间歇动作的模式,车载设备控制装置也可以维持雨刮器的低速动作。进而,该车载设备控制装置在通过自动控制使控制对象设备执行视野确保动作的情况下,如果通过操作部指定的控制对象设备的动作模式和与视野确保动作不同的动作模式不同,则经由人机接口向驾驶员通知控制对象设备执行中的动作模式和通过操作部指定的动作模式不一致。
[0029]
图1是安装车载设备控制装置的车辆控制系统的概略结构图。在本实施方式中,搭载于车辆100并且控制车辆100的车辆控制系统1具有照相机11、gps接收机12、存储装置13、人机接口(以下称为hmi)14、至少一个传感器15、操作开关16、行驶控制用电子控制装置(以下称为行驶ecu)17、以及车体控制用电子控制装置(以下称为body-ecu)18。照相机11、gps接收机12、存储装置13、hmi14、行驶ecu17以及body-ecu18经由依照控制器局域网这样的标准的车内网络可通信地连接。另外,传感器15以及操作开关16与body-ecu18经由信号线连接。另外,body-ecu18与前大灯21、雨刮器22以及空调装置23经由信号线连接。车辆控制系统1也可以还具有lider传感器或者雷达这样的用于探测车辆100的周围的物体的物体探测用传感器、用于与车外设备进行通信的无线通信机。进而另外,车辆100也可以代替gps接收机12而具有依照其他卫星测位系统的接收机。
[0030]
照相机11是摄像部的一个例子,具有ccd或者c-mos等由对可见光具有灵敏度的光电变换元件的阵列构成的二维检测器和在该二维检测器上使成为摄影对象的区域的图像成像的成像光学系统。而且,照相机11以朝向车辆100的前方的方式,例如安装到车辆100的车内。而且,照相机11按预定的摄影周期(例如1/30秒~1/10秒),对车辆100的前方区域进行摄影,生成拍摄了该前方区域的图像。通过照相机11得到的图像既可以是彩色图像、或者也可以是灰色图像。此外,也可以在车辆100中设置摄影方向或者焦距不同的多个照相机。
[0031]
照相机11每当生成图像时,将该生成的图像经由车内网络输出给行驶ecu17。
[0032]
gps接收机12按预定的周期,接收来自全球定位系统(global positioning system,gps)卫星的gps信号,根据接收到的gps信号,测定车辆100的自己位置。然后,gps接收机12按预定的周期,将基于gps信号的车辆100的自己位置的测位结果经由车内网络输出
给行驶ecu17。此外,在车辆100具有依照gps接收机12以外的卫星测位系统的接收机的情况下,该接收机对车辆100的自己位置进行测位即可。
[0033]
存储装置13例如具有硬盘装置或者非易失性的半导体存储器。而且,存储装置13存储地图信息。在地图信息中,针对道路的预定的每个区间,包括该区间的位置、以及该区间中的、表示行车道划区线或者停止线这样的道路标示的信息以及表示道路标识的信息。而且,存储装置13依照来自行驶ecu17的地图信息的读出请求,读出地图信息,经由车内网络将地图信息传给行驶ecu17。
[0034]
hmi14是通知部的一个例子,将从行驶ecu17或者body-ecu18接受的通知用的信息通知给车辆100的驾驶员。为此,hmi14例如具有液晶显示器这样的显示装置、速度计等仪表、警告灯、以及扬声器等,在车辆100的车内,例如在仪表板中以面向驾驶员的方式设置。而且,hmi14例如在车辆100为自动驾驶控制、并且、关于前大灯21、雨刮器22以及空调装置23中的任意一个执行的动作模式和通过用于操作其中的任意一个的开关指定的动作模式不同的情况下,将其意思通知给驾驶员。
[0035]
传感器15测定与照相机11以及驾驶员能够对车辆100的周围进行视觉辨认的程度关联的、表示车外环境或者车内环境的物理参数。例如,传感器15包括用于测定车辆100的周围的明亮度(照度)的照度传感器、用于测定车辆100的周围的雨量的雨传感器、以及用于测定车辆100的周围的温度的温度计及用于测定车内的温度的温度计中的至少任意一个。而且,传感器15每当测定物理参数(照度、雨量、温度等)来求出该物理参数的测定值时,将该测定值输出给body-ecu18。例如,在通过body-ecu18对前大灯21、雨刮器22以及空调装置23这样的车载设备自动地进行了动作设定的情况下,为了判定body-ecu18是否使该车载设备执行视野确保动作,利用这些测定值。
[0036]
操作开关16是操作部的一个例子,被用于驾驶员指定应用于前大灯21、雨刮器22以及空调装置23的动作模式。在本实施方式中,在操作开关16中包括用于操作前大灯21的操作开关16a、用于操作雨刮器22的操作开关16b、以及用于控制空调装置23的操作开关16c。用于操作前大灯21的操作开关16a例如在从驾驶员观察时设置于方向盘的背面侧并且右侧。另外,用于操作雨刮器22的操作开关16b例如在从驾驶员观察时设置于方向盘的背面侧并且左侧。进而,用于操作空调装置23的操作开关16c例如在仪表板中设置于驾驶席与副驾席之间。
[0037]
在操作开关16a~16c中,分别设置有指定不同的动作模式的多个开关位置。
[0038]
图2是用于操作前大灯21的操作开关16a的开关位置的说明图。例如,在操作开关16a中,作为开关位置设置有head位置、tail位置、auto位置、以及off位置。head位置是指定使前大灯21以及尾灯强制性地点亮的动作模式的开关位置。tail位置是指定不使前大灯21点亮而使尾灯点亮的动作模式的开关位置。auto位置是指定根据由照度传感器测定的车辆100的周围的照度来控制使前大灯以及车辆100的尾灯自动地点亮或者熄灭的动作模式的开关位置。而且,off位置是指定使前大灯21以及尾灯都熄灭的动作模式的开关位置。而且,通过驾驶员使在操作开关16a的前端可绕操作开关16a的轴旋转地设置的指示部件161的标记162对准到某一个开关位置,操作开关16a每当开关位置被变更时,输出表示与该开关位置对应的动作模式的操作信号。
[0039]
进而,操作开关16a也可以能够设定前大灯21的配光方向(例如上朝向和下朝向)。
进而另外,操作开关16a也可以关于前大灯21能够设定自动配向控制的应用。
[0040]
图3是用于操作雨刮器22的操作开关16b的开关位置的说明图。例如,在操作开关16b中,作为开关位置从上依次设置有int位置、off位置、auto位置、lo位置、以及hi位置。auto位置是根据由雨传感器测定的雨量自动地决定是否使雨刮器22进行擦拭车辆100的前窗玻璃的动作(以下简称为动作)、并且指定自动地调整雨刮器22的动作速度的动作模式的开关位置。hi位置是指定雨刮器22以比较快的速度动作的动作模式的开关位置。lo位置是指定雨刮器22以比较慢的速度动作的动作模式的开关位置。int位置是指定雨刮器22间歇性地动作的动作模式的开关位置。而且,off位置是指定雨刮器22停止的动作模式的开关位置。进而,操作开关16b也可以在开关位置为int位置的情况下能够调整雨刮器22的动作间隔。而且,通过驾驶员使操作开关16b上下移动,操作开关16b的开关位置变化。操作开关16b每当开关位置被变更时,输出表示与该开关位置对应的动作模式的操作信号。
[0041]
进而,在用于操作空调装置23的操作开关16c中,例如设置有:除霜器开关,能够切换是否使空调装置23强制性地执行除霜动作;以及模式切换开关,切换是否应用对空调装置23进行自动控制以使车辆100的车内的温度成为设定的温度的auto模式。而且,操作开关16c每当除霜器开关的开关位置或者模式切换开关的开关位置被驾驶员变更时,输出表示与这些开关位置对应的动作模式的操作信号。
[0042]
行驶ecu17执行与车辆100的行驶有关的控制。为此,行驶ecu17例如具有一个或者多个处理器、存储器、以及通信接口。在本实施方式中,行驶ecu17切换对车辆100进行自动驾驶控制还是进行手动驾驶控制。例如,行驶ecu17在车辆100进入到在地图信息中示出的可自动驾驶控制的区间时,从手动驾驶控制切换到自动驾驶控制。相反,行驶ecu17在车辆100离开可自动驾驶控制的区间时,从自动驾驶控制切换到手动驾驶控制。此外,行驶ecu17根据由gps接收机12得到的测位信息、或者通过匹配在地图信息中示出的行车道划区线等地物和在由照相机11得到的图像中示出的地物来推测的车辆100的本车位置和地图信息,判定车辆100是否包含于可自动驾驶控制的区间即可。另外,行驶ecu17在应用自动驾驶控制的情况下,在驾驶员操作能够切换自动驾驶控制的on/off的开关(未图示)而自动驾驶控制成为off时,从自动驾驶控制切换到手动驾驶控制。行驶ecu17在应用自动驾驶控制的期间,例如,以使车辆100沿着通过导航系统(未图示)设定的行驶路线行驶的方式,对车辆100进行自动驾驶控制。此时,行驶ecu17从由照相机11得到的时间序列的一连串的图像检测车辆100的周围的物体,预测检测到的物体的轨迹,从而以避免车辆100与该物体碰撞的方式设定车辆100的行驶路径。然后,以使车辆100沿着该行驶路径行驶的方式,决定加速器开度、方向盘的转向角或者制动量等控制量,依照该控制量,对控制加速器、方向盘或者制动器等的致动器进行控制。进而,行驶ecu17在从自动驾驶控制切换到手动驾驶控制时、或者、从手动驾驶控制切换到自动驾驶控制时,经由hmi14向驾驶员通知进行该切换,并且,向body-ecu18发送表示在切换后应用的驾驶控制的种类(自动或者手动)的信号。
[0043]
进而另外,行驶ecu17在从body-ecu18经由车内网络接收到表示与操作开关16的开关位置对应的动作模式(设定动作模式)和对应的车载设备执行中的动作模式(执行动作模式)不同的信号时,将设定动作模式和执行动作模式不同的情况经由hmi14通知给驾驶员。例如,行驶ecu17使表示设定动作模式和执行动作模式不同的消息显示于hmi14具有的显示装置、或者、使该消息从hmi14具有的扬声器作为声音输出。同样地,行驶ecu17在从
body-ecu18经由车内网络接收到表示在切换到手动驾驶控制后继续视野确保动作、或者结束该视野确保动作的继续的信号时,将其意思经由hmi14通知给驾驶员。
[0044]
body-ecu18是车载设备控制装置的一个例子,控制前大灯21、雨刮器22以及空调装置23这样的车载设备。
[0045]
图4是作为车载设备控制装置的一个实施方式的body-ecu18的硬件结构图。body-ecu18具有通信接口31、存储器32、以及处理器33。此外,通信接口31、存储器32以及处理器33既可以是个别的电路、或者也可以构成为一个集成电路。
[0046]
通信接口31是车内通信部的一个例子,具有:通信接口电路,用于将body-ecu18连接到车内网络;以及接口电路,能够接收来自传感器15或者操作开关16的信号、或者输出向前大灯21、雨刮器22或者空调装置23的控制信号。而且,通信接口31在经由车内网络从行驶ecu17接收到表示应用的驾驶控制的种类的信号时,将该信号传给处理器33。进而,通信接口31每当从传感器15接收到表示照度、雨量或者温度等测定值的信号时,将该信号传给处理器33。进而,通信接口31每当从操作开关16接收到表示指定的动作模式的信号时,将该信号传给处理器33。
[0047]
另外,通信接口31在从处理器33关于某个车载设备接收到表示设定动作模式和执行动作模式不同等向驾驶员通知的情况的信号时,将该信号经由车内网络输出给行驶ecu17。进而,通信接口31在从处理器33接收到向某个车载设备的控制信号时,将该控制信号输出给该车载设备。
[0048]
存储器32是存储部的一个例子,例如,具有易失性的半导体存储器以及非易失性的半导体存储器。而且,存储器32存储由body-ecu18的处理器33执行的车载设备控制处理(包括视野确保动作结束判定处理)的程序、在车载设备控制处理中使用的各种数据、以及物理参数的测定值等。
[0049]
处理器33是控制部的一个例子,具有1个或者多个cpu(central processing unit,中央处理单元)及其周边电路。处理器33也可以还具有逻辑运算单元或者数值运算单元这样的其他运算电路。而且,处理器33执行车载设备控制处理,控制前大灯21、雨刮器22以及空调装置23。
[0050]
处理器33在行驶ecu17执行手动驾驶控制的期间,依照由操作开关16a~16c指定的动作模式,控制前大灯21、雨刮器22以及空调装置23。另外,在行驶ecu17自动驾驶控制的期间,处理器33依照由传感器15测定物理参数的测定值,自动地决定是否使前大灯21、雨刮器22以及空调装置23执行视野确保动作。但是,在关于操作开关16a~16c的任意一个指定了使对应的控制对象设备执行视野确保动作的动作模式的情况下,处理器33也可以使该对应的控制对象设备执行视野确保动作。另外,在从自动驾驶控制切换到手动驾驶控制时,即在自动驾驶控制的执行中从行驶ecu17通知到应用手动驾驶控制时,如果关于前大灯21、雨刮器22以及空调装置23中的任意控制对象设备进行了视觉确保动作,则处理器33无论通过与该控制对象设备对应的操作开关指定的动作模式如何,都使该控制对象设备继续视野确保动作。
[0051]
图5是从自动驾驶控制切换到手动驾驶控制时的车载设备控制处理的动作流程图。处理器33在自动驾驶控制的应用中从行驶ecu17通知到应用手动驾驶控制时,关于前大灯21、雨刮器22以及空调装置23的各个,依照以下的动作流程图控制。
[0052]
处理器33在自动驾驶控制的应用中从行驶ecu17通知到应用手动驾驶控制时,判定控制对象设备(前大灯21、雨刮器22、空调装置23)是否正在执行视野确保动作(步骤s101)。在控制对象设备正在执行视野确保动作的情况下(步骤s101
-“
是”),处理器33以使控制对象设备继续视野确保动作的方式控制该控制对象设备(步骤s102)。
[0053]
另一方面,在控制对象设备未执行视野确保动作的情况下(步骤s101
-“
否”),处理器33依照与关于与控制对象设备对应的操作开关设定的开关位置对应的动作模式,控制该控制对象设备(步骤s103)。
[0054]
在步骤s102或者s103之后,处理器33结束车载设备控制处理。
[0055]
此外,关于在从自动驾驶控制切换到手动驾驶控制之后继续了视野确保动作的控制对象设备,如果满足预定的条件,则处理器33结束该视野确保动作的继续。
[0056]
以下,详细说明前大灯21的控制。
[0057]
图6是示出与前大灯21有关的操作开关16a的开关位置、照度、应用的驾驶控制、以及前大灯21的控制状态的关系的一个例子的图。在图6所示的表格600中,从上依次示出设定的开关位置是off位置的情况、是tail位置的情况、是auto位置的情况、以及是head位置的情况的各个情况下的、前大灯21的点亮状态、动作模式的一致或者不一致、以及操作开关16a的操作可否受理。另外,从左依次示出应用手动驾驶控制的情况(自动驾驶控制以前)、应用自动驾驶控制的情况、刚刚从自动驾驶控制切换到手动驾驶控制之后的、前大灯21的点亮状态、动作模式的一致或者不一致、以及操作开关16的操作可否受理。
[0058]
在本实施方式中,处理器33在行驶ecu17执行自动驾驶控制的期间,与操作开关16a的开关位置设定于auto位置时同样地,根据照度的测定值,自动地决定是否使前大灯21等车辆100的照明灯点亮。例如,如果照度是第1照度阈值以上、并且小于比第1照度阈值高的第2照度阈值,则处理器33使前大灯21熄灭,使尾灯点亮。另外,如果照度小于第1照度阈值,则处理器33使前大灯21以及尾灯点亮。进而,如果照度是第2照度阈值以上,则处理器33使前大灯21以及尾灯熄灭。但是,处理器33也可以在操作开关16a的开关位置成为head位置的情况下,无论照度的测定值如何,都使前大灯21以及尾灯点亮。
[0059]
另外,处理器33在行驶ecu17执行手动驾驶控制的期间,依照与关于操作开关16a设定的开关位置对应的动作模式,控制前大灯21等照明灯。
[0060]
但是,在本实施方式中,处理器33在应用的驾驶控制从自动驾驶控制切换到手动驾驶控制时,即在自动驾驶控制的执行中从行驶ecu17通知到应用手动驾驶控制时,在刚刚之前的自动驾驶控制中进行了视觉确保动作时,无论操作开关16a的开关位置如何,都控制前大灯21以在切换到手动驾驶控制之后也继续视野确保动作。例如,在刚刚之前的自动驾驶控制的执行时前大灯21点亮的情况下,即使操作开关16a的开关位置为off位置或者tail位置,处理器33也继续前大灯21的点亮。
[0061]
处理器33在切换到手动驾驶控制之后也继续前大灯21的视野确保动作的情况下,例如根据照度的测定值,判定是否结束视野确保动作的继续。
[0062]
图7是与前大灯21有关的视野确保动作结束判定处理的动作流程图。处理器33在从自动驾驶控制切换到手动驾驶控制之后前大灯21继续视野确保动作的情况下,每隔预定的周期,依照以下的动作流程图,判定是否结束视野确保动作。
[0063]
处理器33判定照度的测定值是否为预定的照度阈值以上(步骤s201)。如果照度的
测定值小于预定的照度阈值(步骤s201
-“
否”),则处理器33使前大灯21继续视野确保动作(步骤s202)。即,处理器33维持前大灯21点亮的状态。另一方面,如果照度的测定值是预定的照度阈值以上(步骤s201
-“
是”),即如果车辆100的周围的明亮度为不点亮前大灯21也可以的明亮度,则处理器33使前大灯21熄灭,结束视野确保动作。然后,处理器33依照通过操作开关16a指定的动作模式,控制前大灯21(步骤s203)。在步骤s202或者s203之后,处理器33结束视野确保动作结束判定处理。此外,将预定的照度阈值例如能够设为上述第1照度阈值或者第2照度阈值。
[0064]
根据变形例,处理器33也可以在自从自动驾驶控制切换到手动驾驶控制的定时起经过预定期间时,关于前大灯21结束视野确保动作的继续。或者,通过由驾驶员实施的操作开关16a的操作,在与操作开关16a的开关位置对应的动作模式和关于前大灯21执行中的动作模式一致时,处理器33也可以关于前大灯21结束视野确保动作的继续。
[0065]
根据其他变形例,处理器33也可以在切换到手动驾驶控制之后前大灯21继续视野确保动作的情况下,在从行驶ecu17通知到车辆100的车速为预定的速度阈值以下、并且变速杆的档位为车辆100的动力不被传递到车轮的档位时,关于前大灯21结束视野确保动作的继续。此外,车辆100的动力不被传递到车轮的档位例如是空档位置或者停车位置。另外,将预定的速度阈值例如能够设为5km/h。或者另外,处理器33也可以在从行驶ecu17通知到点火开关为off时,关于前大灯21结束视野确保动作的继续。
[0066]
处理器33在结束视野确保动作的继续以后,依照与关于操作开关16a设定的开关位置对应的动作模式,控制前大灯21即可。
[0067]
此外,在执行自动驾驶控制的期间,驾驶员操作了设定前大灯21的配光方向的操作开关(未图示)的情况下,处理器33也可以将表示根据该操作指定的配光方向的标志存储到存储器32。而且,处理器33也可以在切换到手动驾驶控制之后,参照该标志,以成为与该操作对应的配光方向的方式控制前大灯21。
[0068]
接下来,详细说明雨刮器22的控制。
[0069]
图8是示出与雨刮器22有关的操作开关16的开关位置、雨量、应用的驾驶控制、以及雨刮器22的控制状态的关系的一个例子的图。在图8所示的表格800中,从上依次示出开关位置是off位置的情况、是int位置的情况、是auto位置的情况、以及是lo位置或者hi位置的情况的各个情况下的、雨刮器22的动作状态、动作模式的一致或者不一致、以及操作开关16b的操作可否受理。另外,从左依次示出应用手动驾驶控制的情况(自动驾驶控制以前)、应用自动驾驶控制的情况、刚刚从自动驾驶控制切换到手动驾驶控制之后的、雨刮器22的动作状态、动作模式的一致或者不一致、以及操作开关16b的操作可否受理。
[0070]
在本实施方式中,处理器33在行驶ecu17执行自动驾驶控制的期间,与操作开关16b的开关位置设定为auto位置时同样地,根据由雨传感器测定的雨量,控制雨刮器22。例如,如果雨量的测定值小于第1雨量阈值,则处理器33停止雨刮器22的动作。另外,如果雨量的测定值是第1雨量阈值以上、并且、小于比第1雨量阈值高的第2雨量阈值,则处理器33使雨刮器22间歇性地动作。另外,如果雨量的测定值是第2雨量阈值以上、并且、小于比第2雨量阈值高的第3雨量阈值,则处理器33使雨刮器22以相对慢的速度(即以开关位置设定为lo位置时的速度)动作。进而,如果雨量的测定值是第3雨量阈值以上,则处理器33使雨刮器22以相对快的速度(即以开关位置设定为hi位置时的速度)动作。但是,处理器33也可以在操
作开关16b的开关位置为hi位置或者lo位置的情况下,无论雨量的测定值如何,使雨刮器22以与设定的开关位置对应的速度动作。
[0071]
另外,处理器33在行驶ecu17执行手动驾驶控制的期间,依照与操作开关16b的开关位置对应的动作模式,控制雨刮器22。
[0072]
但是,在本实施方式中,处理器33在应用的驾驶控制从自动驾驶控制切换到手动驾驶控制时,即在自动驾驶控制的执行中从行驶ecu17通知到应用手动驾驶控制时,如果在刚刚之前的自动驾驶控制中雨刮器22执行视觉确保动作,则无论操作开关16b的开关位置如何,以继续视野确保动作的方式控制雨刮器22。例如,在刚刚之前的自动驾驶控制的执行时雨刮器22执行与hi位置、lo位置或者int位置中的某一个对应的动作的情况下,处理器33使雨刮器22继续该动作。此外,在开关位置设定为auto位置、hi位置或者lo位置的情况下,处理器33在刚刚从自动驾驶控制切换到手动驾驶控制之后,也依照该开关位置使雨刮器22动作即可。
[0073]
处理器33在切换到手动驾驶控制之后也继续雨刮器22的视野确保动作的情况下,例如,根据雨量的测定值以及车速等,判定是否结束视野确保动作的继续。
[0074]
图9是与雨刮器22有关的视野确保动作结束判定处理的动作流程图。处理器33在从自动驾驶控制切换到手动驾驶控制之后雨刮器22继续视野确保动作的情况下,每隔预定的周期,依照以下的动作流程图判定是否结束视野确保动作。
[0075]
处理器33判定雨量的测定值是否小于预定的雨量阈值(步骤s301)。如果照度的测定值是预定的雨量阈值以上(步骤s301
-“
否”),则处理器33判定是否从行驶ecu17通知到车辆100的车速为预定的速度阈值(例如5km/h)以下、并且、变速杆的档位为空档位置或者停车位置(步骤s302)。在车速高于速度阈值、或者档位不是空档位置以及停车位置中的任意一个的情况下(步骤s302
-“
否”),处理器33使雨刮器22继续视野确保动作(步骤s303)。即,处理器33维持雨刮器22动作的状态。另一方面,在车速为速度阈值以下、并且、变速杆的档位是空档位置或者停车位置的情况下(步骤s302
-“
是”),处理器33结束雨刮器22的视野确保动作。然后,处理器33依照与关于操作开关16b设定的开关位置对应的动作模式,控制雨刮器22(步骤s304)。
[0076]
另外,在步骤s301中,如果雨量的测定值小于预定的雨量阈值(步骤s301
-“
是”),即如果车辆100的周围的雨量为不使雨刮器22动作也可以的程度,则处理器33结束雨刮器22的视野确保动作。然后,处理器33依照与关于操作开关16b设定的开关位置对应的动作模式,控制雨刮器22(步骤s304)。在步骤s303或者s304之后,处理器33结束视野确保动作结束判定处理。此外,将预定的雨量阈值例如能够设为上述第1雨量阈值。
[0077]
根据变形例,处理器33也可以在自从自动驾驶控制切换到手动驾驶控制的定时起经过预定期间时,关于雨刮器22结束视野确保动作的继续。或者,通过由驾驶员实施的操作开关16b的操作,在与操作开关16b的开关位置对应的动作模式和关于雨刮器22执行中的动作模式一致时,处理器33也可以关于雨刮器22结束视野确保动作的继续。
[0078]
根据其他变形例,处理器33也可以在从行驶ecu17通知到点火开关为off时,关于雨刮器22结束视野确保动作的继续。
[0079]
处理器33在结束视野确保动作的继续以后,依照与关于操作开关16b设定的开关位置对应的动作模式控制雨刮器22即可。
[0080]
接下来,详细说明空调装置23的控制。
[0081]
在本实施方式中,处理器33在行驶ecu17执行自动驾驶控制的期间,与操作开关16c的模式切换开关设定为应用auto模式的开关位置时同样地,根据车辆100的车内的温度以及车外的温度,自动地控制是否使空调装置23进行除霜动作。例如,处理器33在车内的温度以及车外的温度满足有在车辆100的前窗玻璃产生雾的可能性的预定的条件的情况下,使空调装置23进行除霜动作。另外,处理器33在车内的温度以及车外的温度不满足该预定的条件的情况下,不使空调装置23执行除霜动作。
[0082]
另外,处理器33在行驶ecu17执行手动驾驶控制的期间,依照与操作开关16c的开关位置对应的动作模式,控制空调装置23。
[0083]
但是,在本实施方式中,处理器33在自动驾驶控制的执行中从行驶ecu17通知到应用手动驾驶控制时,判定在刚刚之前的自动驾驶控制中空调装置23是否执行除霜动作(即视野确保动作)。然后,在空调装置23执行除霜动作时,无论操作开关16c的开关位置如何,处理器33以使空调装置23继续除霜动作的方式控制空调装置23。
[0084]
处理器33也可以在切换到手动驾驶控制之后空调装置23继续除霜动作的情况下,在从切换到该手动驾驶控制的定时起经过预定期间,或者,与操作开关16c的开关位置对应的动作模式和空调装置23的执行中的动作模式一致时,结束利用空调装置23的视野确保动作的继续。处理器33在结束视野确保动作的继续以后,依照与操作开关16c的开关位置对应的动作模式控制空调装置23即可。
[0085]
或者,处理器33也可以在切换到手动驾驶控制之后空调装置23继续除霜动作的情况下,在车辆100的车内的温度以及车外的温度不满足使空调装置23执行除霜动作的预定的条件时,结束视野确保动作的继续。
[0086]
或者另外,处理器33也可以在切换到手动驾驶控制之后空调装置23继续除霜动作的情况下,在从行驶ecu17通知到车辆100的车速为预定的速度阈值(例如5km/h)以下、并且、变速杆的档位为空档位置或者停车位置时,结束空调装置23的除霜动作的继续。或者另外,处理器33也可以在从行驶ecu17通知到点火开关为off时,结束空调装置23的除霜动作的继续。
[0087]
处理器33在与操作开关16a~16c的开关位置对应的动作模式(设定动作模式)和在对应的车载设备中执行中的动作模式(执行动作模式)不同的情况下,生成表示设定动作模式和对应的车载设备的执行动作模式不同的不一致通知信号。然后,处理器33将该不一致通知信号经由通信接口31输出给行驶ecu17。例如,关于前大灯21,在自动驾驶控制的执行中被通知到通过驾驶员的操作而开关位置从操作开关16a变更到off位置或者tail位置时,处理器33将与前大灯21有关的不一致通知信号经由通信接口31输出给行驶ecu17。然后,行驶ecu17在接收到与前大灯21有关的不一致通知信号时,使“当前是灯auto控制中”这样的消息显示于hmi14。另外,关于雨刮器22,在自动驾驶控制的执行中被通知到通过驾驶员的操作而开关位置从操作开关16b变更到off位置或者int位置时,处理器33将与雨刮器22有关的不一致通知信号经由通信接口31输出给行驶ecu17。然后,行驶ecu17在接收到与雨刮器22有关的不一致通知信号时,使“当前雨刮器是auto控制中”这样的消息显示于hmi14。
[0088]
另外,处理器33在切换到手动驾驶控制之后任意车载设备继续视野确保动作、并
且、关于该车载设备的设定动作模式不是与视野确保动作相当的动作模式的情况下,生成表示视野确保动作继续的继续通知信号。然后,处理器33将该继续通知信号经由通信接口31输出给行驶ecu17。例如,在操作开关16a的开关位置是off位置或者tail位置、并且、在刚刚之前的自动驾驶控制时前大灯21点亮时,处理器33将与前大灯21有关的继续通知信号经由通信接口31输出给行驶ecu17。然后,行驶ecu17在接收到与前大灯21有关的继续通知信号时,使“继续auto控制”这样的消息显示于hmi14。另外,关于雨刮器22,例如,在操作开关16b的开关位置是off位置或者int位置、并且、在刚刚之前的自动驾驶控制时雨刮器22执行与hi位置或者lo位置相当的动作时,处理器33将与雨刮器22有关的继续通知信号经由通信接口31输出给行驶ecu17。然后,行驶ecu17在接收到与雨刮器22有关的继续通知信号时,使“继续雨刮器auto控制”这样的消息显示于hmi14。
[0089]
进而,处理器33在关于任意车载设备结束视野确保动作的继续的情况下,生成表示视野确保动作的继续结束的结束通知信号,将该结束通知信号经由通信接口31输出给行驶ecu17。例如,在结束前大灯21的视野确保动作的继续的情况下,处理器33将与前大灯21有关的结束通知信号经由通信接口31输出给行驶ecu17。然后,行驶ecu17在接收到与前大灯21有关的结束通知信号时,使“结束auto控制”这样的消息显示于hmi14。另外,在结束雨刮器22的视野确保动作的继续的情况下,处理器33将与雨刮器22有关的结束通知信号经由通信接口31输出给行驶ecu17。然后,行驶ecu17在接收到与雨刮器22有关的结束通知信号时,使“结束雨刮器auto控制”这样的消息显示于hmi14。
[0090]
进而另外,处理器33也可以在从手动驾驶控制切换到自动驾驶控制时,在操作开关16a的开关位置是off位置或者tail位置的情况下,将表示关于前大灯21开始自动控制的开始通知信号经由通信接口31输出给行驶ecu17。然后,行驶ecu17也可以在接收到与前大灯21有关的开始通知信号时,使“开始灯auto控制”这样的消息显示于hmi14。另外,也可以在从手动驾驶控制切换到自动驾驶控制时,在操作开关16b的开关位置是off位置或者int位置的情况下,处理器33将表示关于雨刮器22开始自动控制的开始通知信号经由通信接口31输出给行驶ecu17。然后,行驶ecu17也可以在接收到与雨刮器22有关的开始通知信号时,使“开始雨刮器auto控制”这样的消息显示于hmi14。
[0091]
如以上说明,该车载设备控制装置搭载于能够应用自动驾驶控制的车辆,控制前大灯、雨刮器以及空调装置这样的车载设备。然后,该车载设备控制装置在从自动驾驶控制切换到手动驾驶控制时,在刚刚之前的自动驾驶控制的执行时车载设备执行视野确保动作的情况下,即使切换到手动驾驶控制,无论通过操作该车载设备的操作开关指定的动作模式如何,使该车载设备继续视野确保动作。因此,该车载设备控制装置能够防止在从自动驾驶控制切换到手动驾驶控制时驾驶员难以对车辆的周围进行视觉辨认的情况。
[0092]
根据变形例,body-ecu18的处理器33也可以在自动驾驶控制的执行中,在从自动驾驶控制切换到手动驾驶控制之后前大灯21继续视野确保动作的情况下,或者,在操作开关16a的开关位置是auto位置的情况下,根据车辆100的周围的其他车辆的前大灯的点亮状况,控制前大灯21。
[0093]
在该情况下,处理器33例如通过向以检测在图像中示出的对向车辆以及对向车辆的前大灯的方式预先学习的识别器输入从照相机11取得的图像,根据输入的图像检测车辆100的周围的对向车辆及其前大灯。然后,处理器33关于在图像中示出的各个对向车辆,计
算表示检测到的前大灯的区域的亮度平均值,在该亮度平均值是预定的亮度阈值以上的情况下,判定为该对向车辆的前大灯点亮。或者,处理器33也可以关于在图像中示出的各个对向车辆,计算表示检测到的前大灯的区域的亮度平均值与该区域的周围的区域的亮度平均值的差的绝对值,在该差的绝对值是预定的差分阈值以上的情况下,判定为该对向车辆的前大灯点亮。或者,识别器也可以以还判定前大灯是否为点亮中的方式预先学习。此外,在处理器33中,作为识别器,例如,能够使用具有卷积神经网络型的架构的、所谓深度神经网络。识别器例如使用表示点亮前大灯的车辆的多个教师图像以及表示熄灭前大灯的车辆的多个教师图像,依照误差逆传播法这样的有预定的教师的学习手法预先学习即可。另外,各层的各个节点的权重系数这样的用于确定识别器的参数群预先存储到存储器32即可。
[0094]
处理器33关于在最近的一定期间(例如1~10秒钟)得到的一连串的各个图像,计算前大灯点亮的对向车辆的数量相对检测到的对向车辆的总数的比。然后,处理器33在该比高于预定的比例(例如0.4~0.6)的情况下,控制前大灯21以点亮前大灯21。另一方面,处理器33在该比是预定的比例以下的情况下,控制前大灯21以熄灭前大灯21。
[0095]
进而,在从自动驾驶控制切换到手动驾驶控制之后前大灯21继续视野确保动作的情况下,在前大灯点亮的对向车辆的数量相对检测到的对向车辆的总数的比为预定的比值以下时,处理器33使前大灯21的视野确保动作的继续结束即可。之后,处理器33依照与操作开关16a的开关位置对应的动作模式,控制前大灯21即可。
[0096]
同样地,处理器33也可以在自动驾驶控制的执行中,在从自动驾驶控制切换到手动驾驶控制之后雨刮器22继续视野确保动作的情况下,或者,在操作开关16b的开关位置是auto位置的情况下,根据车辆100的周围的其他车辆的雨刮器的动作状况,控制雨刮器22。
[0097]
在该情况下,处理器33例如通过向以检测在图像中示出的对向车辆以及对向车辆的雨刮器的方式预先学习的识别器输入从照相机11取得的图像,根据输入的图像检测车辆100的周围的对向车辆及其雨刮器。然后,处理器33关于在图像中示出的各个对向车辆,计算检测到的雨刮器的相对水平方向的角度,在该角度是预定的角度阈值以上的情况下,判定为该对向车辆的雨刮器动作。或者,识别器也可以以还判定雨刮器是否为动作中的方式预先学习。即使在该情况下,在处理器33中,作为识别器,例如,能够使用具有卷积神经网络型的架构的、所谓深度神经网络。此外,识别器例如使用表示雨刮器动作中的车辆的多个教师图像以及表示雨刮器停止中的车辆的多个教师图像,依照误差逆传播法这样的有预定的教师的学习手法预先学习即可。另外,各层的各个节点的权重系数这样的、用于确定识别器的参数群预先存储到存储器32即可。
[0098]
处理器33计算从在最近的一定期间(例如1~10秒钟)得到的一连串的各个图像检测的、雨刮器动作的对向车辆的数量相对对向车辆的总数的比。然后,处理器33在该比高于预定的比例(例如0.4~0.6)的情况下,以使雨刮器22以预定的速度(例如与lo位置相当的速度)动作的方式,控制雨刮器22。另一方面,处理器33在该比是预定的比例以下的情况下,以停止雨刮器22的动作的方式,控制雨刮器22。另外,处理器33也可以以该比越高,使雨刮器22的动作速度越快的方式,控制雨刮器22。在该情况下,例如,表示雨刮器动作的对向车辆的数量相对检测出的对向车辆的总数的比和雨刮器22的动作速度的关系的表格被预先存储到存储器32,处理器33通过参照该表格,决定雨刮器的动作速度即可。
[0099]
进而,在从自动驾驶控制切换到手动驾驶控制之后雨刮器22继续视野确保动作的
情况下,在雨刮器动作的车辆的数量相对检测到的车辆的总数的比为预定的比例以下时,处理器33使雨刮器22的视野确保动作的继续结束。之后,处理器33依照与操作开关16b的开关位置对应的动作模式,控制雨刮器22即可。
[0100]
根据其他变形例,body-ecu18也可以不经由行驶ecu17,将用于向驾驶员通知的信号(例如继续通知信号、不一致通知信号等)发送给hmi14,使与该信号对应的消息显示于hmi14。
[0101]
进而根据其他变形例,也可以针对每个车载设备,独立地设置body-ecu。例如,也可以独立地设置控制前大灯21的body-ecu、控制雨刮器22的body-ecu、以及控制空调装置23的body-ecu。即使在该情况下,各body-ecu具有与上述实施方式或者变形例所涉及的body-ecu18同样的结构,并且,依照上述实施方式或者变形例控制对应的车载设备即可。
[0102]
如以上所述,本领域技术人员能够在本发明的范围内,与实施的方式符合地进行各种变更。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 雨刮器

 热门咨询
热门咨询




tips