
 商标分类
商标分类  商标转让
商标转让 
车辆起动期间的电力供应的制作方法
 2021-02-03 13:02:38|
2021-02-03 13:02:38| 191|
191| 起点商标网
起点商标网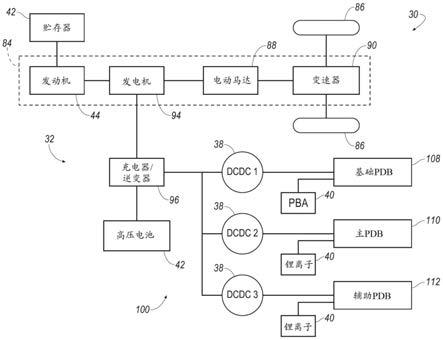
[0001]
本公开总体涉及车辆电力系统。
背景技术:
[0002]
车辆可包括推进装置以生成能量并且将能量转化成车辆的运动。推进装置的类型包括:常规的动力传动系统,所述常规的动力传动系统包括耦接到将旋转运动传递到车轮的变速器的内燃发动机;电动动力传动系统,所述电动动力传动系统包括高压电池、电动马达和将旋转运动传递到车轮的变速器;以及混合动力传动系统,所述混合动力传动系统包括常规的动力传动系统和电动动力传动系统的元件。任何推进装置类型的车辆通常还包括低压电池。
[0003]
在车辆开启的正常操作中,电负载通常由发动机和/或高压电池供电,而无需从低压电池汲取电力。低压电池供应电力以起动车辆,以及在产生来自负载的瞬时需求的情况下供应电力以获得比发动机和/或高压电池可供应的电力更大的电力。当车辆关闭时,电负载减小,并且剩余的电负载通常由低压电池供电。
技术实现要素:
[0004]
本文所描述的系统可在车辆处于关闭状态时并且在车辆起动时保存电池电量。所述系统可响应于请求来选择要从中最佳地汲取的电源以便提供足够的电力,并且可基于请求的类型来提供最佳电量。所述系统还可选择要激励的功率继电器以及要进行通电的模块,同时使车辆的其余部分处于关闭状态,这也可提供有效的电力消耗。
[0005]
一种系统包括虚拟驾驶员模块;dc/dc转换器,所述dc/dc转换器电耦接到所述虚拟驾驶员模块;低压电池,所述低压电池电耦接到所述虚拟驾驶员模块;高压电池,所述高压电池电耦接到所述dc/dc转换器;以及计算机,所述计算机可通信地耦接到所述dc/dc转换器。所述计算机被编程为响应于在手动模式下起动包括所述虚拟驾驶员模块的车辆的请求,所述车辆在所述请求时处于关闭状态,将所述dc/dc转换器的设定点设定为第一电压;然后对所述车辆执行至少一个预驾驶测试;并且然后将所述dc/dc转换器的所述设定点设定为低于所述第一电压的第二电压。
[0006]
一种系统包括计算机,所述计算机包括处理器和存储指令的存储器,所述指令能由所述处理器执行以:响应于在手动模式下起动车辆的请求,在所述请求时所述车辆处于关闭状态,将虚拟驾驶员模块置于高电力汲取状态;然后对所述车辆执行至少一个预驾驶测试;并且然后将所述虚拟驾驶员模块置于低电力汲取状态。
[0007]
所述系统还可包括dc/dc转换器,所述dc/dc转换器电耦接到所述虚拟驾驶员模块并且可通信地耦接到所述计算机,并且将所述虚拟驾驶员模块置于所述高电力汲取状态可以是将所述dc/dc转换器的设定点设定为第一电压,并且将所述虚拟驾驶员模块置于所述低电力汲取状态可以是将所述dc/dc转换器的所述设定点设定为低于所述第一电压的第二电压。
[0008]
执行所述预驾驶测试可包括以下中的至少一项:确定电池的电量是否足够高以将所述车辆置于最小风险状况;执行转向动作并确定来自转向角传感器的数据是否与所述转向动作匹配;或者执行制动动作并确定来自制动传感器的数据是否与所述制动动作匹配。
[0009]
所述指令还可包括响应于在所述车辆处于所述关闭状态时控制模块对动作的请求,在确定低压电池的电量低于基于所述动作的电力需求的阈值时从所述低压电池向所述控制模块提供电力。所述指令还可包括响应于在所述车辆处于所述关闭状态时所述控制模块对所述动作的所述请求,初始化高压电池并且在确定所述低压电池的所述电量高于所述阈值时从所述高压电池向所述控制模块提供电力。所述系统还可包括dc/dc转换器,所述dc/dc转换器电耦接到所述控制模块并且可通信地耦接到所述计算机,并且从所述高压电池向所述控制模块提供电力可包括基于所述动作的所述电力需求来设定所述dc/dc转换器的设定点。
[0010]
所述动作可以是下载所述控制模块的更新。
[0011]
一种方法包括响应于在手动模式下起动车辆的请求,在所述请求时所述车辆处于关闭状态,将虚拟驾驶员模块置于高电力汲取状态;然后对所述车辆执行至少一个预驾驶测试;以及然后将所述虚拟驾驶员模块置于低电力汲取状态。
[0012]
将所述虚拟驾驶员模块置于所述高电力汲取状态可以是将电耦接到所述虚拟驾驶员模块的dc/dc转换器的设定点设定为第一电压,并且将所述虚拟驾驶员模块置于所述低电力汲取状态可以是将所述dc/dc转换器的所述设定点设定为低于所述第一电压的第二电压。
[0013]
执行所述预驾驶测试可包括以下中的至少一项:确定电池的电量是否足够高以将所述车辆置于最小风险状况;执行转向动作并确定来自转向角传感器的数据是否与所述转向动作匹配;或者执行制动动作并确定来自制动传感器的数据是否与所述制动动作匹配。
[0014]
所述方法还可包括响应于在所述车辆处于所述关闭状态时控制模块对动作的请求,在确定低压电池的电量低于基于所述动作的电力需求的阈值时从所述低压电池向所述控制模块提供电力。所述方法还可包括响应于在所述车辆处于所述关闭状态时所述控制模块对所述动作的所述请求,初始化高压电池并且在确定所述低压电池的所述电量高于所述阈值时从所述高压电池向所述控制模块提供电力。从所述高压电池向所述控制模块提供电力可包括基于所述动作的所述电力需求来设定电耦接到所述控制模块的dc/dc转换器的设定点。
[0015]
所述动作可以是下载所述控制模块的更新。
附图说明
[0016]
图1是示例性车辆的框图。
[0017]
图2是图1的车辆的示例性推进系统的框图。
[0018]
图3a至图3c是图1的车辆的示例性配电系统的电路图。
[0019]
图4是用于向配电系统中的负载提供电力的示例性过程的过程流程图。
具体实施方式
[0020]
参考附图,车辆30中的系统32包括虚拟驾驶员模块34、电耦接到虚拟驾驶员模块
34的dc/dc转换器38、电耦接到虚拟驾驶员模块34的低压电池40、电耦接到dc/dc转换器38的高压电池42、以及可通信地耦接到dc/dc转换器38的计算机46。计算机46被编程为响应于在手动模式下起动包括虚拟驾驶员模块34的车辆30的请求,车辆30在请求时处于关闭状态,将dc/dc转换器38的设定点设定为第一电压;然后对车辆30执行至少一个预驾驶测试;并且然后将dc/dc转换器38的设定点设定为低于第一电压的第二电压。
[0021]
参考图1,车辆30可以是任何乘用车或商用车,诸如轿车、卡车、运动型多用途车、跨界车、货车、小型货车、出租车、公共汽车等。
[0022]
车辆30是自主或半自主车辆。虚拟驾驶员模块34可被编程来完全地或较小程度地独立于人类驾驶员的干预来操作车辆30。虚拟驾驶员模块34可被编程为基于传感器54提供的数据来操作推进装置48、制动系统50、转向系统52和/或其他车辆系统。出于本公开的目的,自主模式意指虚拟驾驶员模块34在没有来自人类驾驶员的输入的情况下控制推进装置48、制动系统50和转向系统52;半自主模式意指虚拟驾驶员模块34控制推进装置48、制动系统50和转向系统52中的一者或两者,并且人类驾驶员控制剩余部分;并且手动模式意指人类驾驶员控制推进装置48、制动系统50和转向系统52。
[0023]
虚拟驾驶员模块34是基于微处理器的计算机,通常是单个电子控制模块(ecm)。虚拟驾驶员模块34包括处理器、存储器等。虚拟驾驶员模块34的存储器包括用于存储可由处理器执行的指令以及用于以电子方式存储数据和/或数据库的存储器。
[0024]
计算机46是一个或多个基于微处理器的计算机。计算机46包括存储器、至少一个处理器等。计算机46的存储器包括用于存储可由处理器执行的指令以及用于以电子方式存储数据和/或数据库的存储器。计算机46可以是与虚拟驾驶员模块34相同的控制器,或者计算机46可以是经由通信网络56与虚拟驾驶员模块34通信的一个或多个单独的控制器,或者计算机46可包括包含虚拟驾驶员模块34的多个控制器。换句话说,虚拟驾驶员模块34可执行以下归于计算机46的编程中的一些、全部或不执行任何编程。作为单独的控制器,控制器46可以是或包括例如一个或多个电子控制单元或模块36(ecu或ecm,在下文称为控制模块),诸如混合动力传动系统控制模块58和/或电池能量控制模块60。其他控制模块36可包括车身控制模块62、防抱死制动控制模块64、第一动力转向控制模块66、第二动力转向控制模块68、碰撞缓解系统控制模块70、自主车辆平台接口控制模块72、发动机控制模块74、对象检测维护控制模块76、约束控制模块78和附件控制模块80(图3a至图3c中所示)。
[0025]
计算机46可通过通信网络56和/或通过任何其他有线或无线通信网络发射和接收数据,所述通信网络56可以是控制器局域网(can)总线、以太网、wifi、局域互连网(lin)、车载诊断连接器(obd-ii)。计算机46可经由通信网络56通信地耦接到虚拟驾驶员模块34、其他控制模块36、包括dc/dc转换器38的推进装置48、制动系统50、转向系统52、传感器54、收发器82和其他部件。
[0026]
传感器54可提供关于车辆30的操作的数据,例如车轮转速、车轮取向以及发动机和变速器数据(例如,温度、燃料消耗等)。传感器54可检测车辆30的位置和/或取向。例如,传感器54可包括全球定位系统(gps)传感器;加速度计,诸如压电或微机电系统(mems);陀螺仪,诸如速率陀螺仪、环形激光陀螺仪或光纤陀螺仪;惯性测量单元(imu);和磁力计。传感器54可检测外部世界,例如,车辆30周围环境的对象和/或特征,诸如其他车辆、道路车道标记、交通灯和/或标志、行人等。例如,传感器54可包括雷达传感器、扫描激光测距仪、光探
测和测距(lidar)装置以及诸如相机的图像处理传感器。传感器54可包括通信装置,例如,车辆对基础设施(v2i)或车辆对车辆(v2v)装置。
[0027]
车辆30的推进装置48生成能量并且将能量转化成车辆30的运动。如图2所示,推进装置48可以是混合动力推进装置。推进装置48可包括任何混合动力布置的动力传动系统84,例如,串联混合动力传动系统(如图2所示)、并联混合动力传动系统、动力分配式(串并联)混合动力传动系统等。以下参考图2更详细地描述推进装置48。替代地,推进装置48可以是插入式混合动力推进装置或电池电力推进装置。推进装置48可包括与虚拟驾驶员模块34和/或人类驾驶员通信并接收来自虚拟驾驶员模块34和/或人类驾驶员的输入的控制模块36(例如,混合动力传动系统控制模块58)等。人类驾驶员可经由例如加速踏板和/或换挡杆来控制推进装置48。
[0028]
制动系统50通常是常规的车辆制动子系统并且抵抗车辆30的运动,从而使车辆30减速和/或停止。制动系统50可包括摩擦制动器,诸如盘式制动器、鼓式制动器、带式制动器等;再生制动器;任何其他合适类型的制动器;或者它们的组合。制动系统50可包括与虚拟驾驶员模块34和/或人类驾驶员通信并接收来自虚拟驾驶员模块34和/或人类驾驶员的输入的控制模块36(例如,防抱死制动控制模块64)等。人类驾驶员可经由例如制动踏板来控制制动系统50。
[0029]
转向系统52通常是常规的车辆转向子系统并控制车轮86的转弯。转向系统52可以是具有电动助力转向的齿条与小齿轮系统、线控转向系统(这两者是已知的),或者任何其他合适的系统。转向系统52可包括与虚拟驾驶员模块34和/或人类驾驶员通信并接收来自虚拟驾驶员模块34和/或人类驾驶员的输入的控制模块36(例如,第一动力转向控制模块66和/或第二动力转向控制模块68)等。人类驾驶员可经由例如方向盘来控制转向系统52。
[0030]
收发器82可适用于通过任何合适的无线通信协议(诸如wifi、ieee 802.11a/b/g、其他rf(射频)通信等)无线地发射信号。所述收发器82可适用于与远程服务器(即,与车辆30不同且间隔开的服务器)通信。远程服务器可位于车辆30的外部。例如,远程服务器可与其他车辆相关联(例如,v2v通信),与基础设施部件相关联(例如,经由专用短程通信(dedicated short-range communications,dsrc)等进行的v2i通信),与紧急响应者相关联,与车辆30的所有者相关联的移动装置相关联等。收发器82可以是一个装置或者可包括单独的发射器和接收器。
[0031]
参考图2,推进装置48包括动力传动系统84,所述动力传动系统84通过电动马达88将动力从发动机44、从高压电池42或从发动机44和高压电池42两者传输到变速器90并最终传输到车辆30的车轮86。发动机44是内燃发动机并且可包含用作燃烧室的气缸,所述燃烧室将来自贮存器92的燃料转换成旋转动能。发电机94可从发动机44接收旋转动能。发电机94将旋转动能转换成电力(例如,交流电),并且为电动马达88供电。充电器/逆变器96可将发电机94的输出(例如,交流电)转换成高压直流电以供应高压电池42和配电系统100。出于本公开的目的,“高压”被限定为至少60伏的直流电或至少30伏的交流电。例如,高压直流电可以是大约300伏。充电器/逆变器96控制从高压电池42向动力传动系统84的发电机94供电的量。电动马达88可将来自发电机94的电力转换成被传输到变速器90的旋转动能。变速器90经由例如驱动桥将动能传输到车轮86,同时应用允许扭矩与旋转速度之间的不同折衷的齿轮比。
[0032]
发动机44可在运行与关闭之间切换。当运行时,发动机44可在将动力递送到车轮86的运动状态与未将动力递送到车轮86的非运动状态之间切换。例如,发动机44可例如经由离合器(未示出)在运动状态下耦接到变速器90,并且在非运动状态下与变速器90解耦。
[0033]
高压电池42产生至少60伏的直流电的电压,例如,大约300伏的直流电。高压电池42可以是适合于提供用于操作车辆30的高压电力的任何类型,例如,锂离子、镍金属氢化物、铅酸等。高压电池42经由充电器/逆变器96电耦接到动力传动系统84。如下所述,高压电池42电耦接到多个负载98。
[0034]
参考图3a至图3c,配电系统100包括dc/dc转换器38。如图2的示例性混合动力传动系统所示,dc/dc转换器38经由充电器/逆变器96电耦接到动力传动系统84并且电耦接到低压电池40。dc/dc转换器38可从高压电池42和/或从发动机44或电动马达88接收高压直流电并且将高压直流电转换成低压直流电;通常,对于图2所示的混合动力布置并且对于推进装置48的其他布置,dc/dc转换器38将来自高压总线的高压电流转换成用于低压总线的低压电流。出于本公开的目的,“低压”被限定为小于60伏的直流电或小于30伏的交流电。例如,低压直流电可以是12伏或48伏。每个dc/dc转换器38都可与低压电池40中的一者交换低压直流电,并且每个dc/dc转换器38都可将低压直流电供应到多个配电板总线102、104、106中的一者。
[0035]
计算机46可通过为每个dc/dc转换器38设定设定点来控制dc/dc转换器38。设定点是dc/dc转换器38提供给低压总线(例如,相应的配电板总线102、104、106)的电压。将dc/dc转换器38的设定点设定得较高提供较大的电压,并且因此向相应的配电板总线102、104、106提供较多的电力,而将dc/dc转换器38的设定点设定得较低提供较小的电压,并且因此向相应的配电板总线102、104、106提供较少的电力。
[0036]
多个配电板108、110、112包括基础配电板108、主配电板110和辅助配电板112。配电板108、110、112将电力分流到子电路(即,负载98)中。配电板108、110、112各自包括配电板总线102、104、106中的一者以及一个或多个保险丝114。配电板总线102、104、106包括基础配电板108中的基础配电板总线102、主配电板110中的主配电板总线104以及辅助配电板112中的辅助配电板总线106。
[0037]
每个低压电池40产生小于60伏的直流电(例如,12伏或48伏的直流电)的电压。低压电池40可以是适合于提供低压电力以对负载98供电的任何类型,例如,锂离子、镍金属氢化物、铅酸等。例如,电耦接到基础配电板108的低压电池40是铅酸电池,并且电耦接到主配电板110和电耦接到辅助配电板112的低压电池40是锂离子电池。低压电池40经由相应的dc/dc转换器38和充电器/逆变器96电耦接到动力传动系统84,并且电耦接到相应的配电板108、110、112上的负载98。
[0038]
低压电池40各自具有可在0%(无剩余电量)与100%(充满电)之间变化的荷电状态。荷电状态可通过监测与计算机46通信的低压电池40的传感器54中的各种传感器(未具体示出)来测量。例如,监测传感器可使用已知的关系根据流动穿过低压电池40的电流并且根据低压电池40的温度来推断荷电状态。荷电状态可替代地以电量为单位(例如,安培时)来进行测量。作为百分比的荷电状态等于以电量为单位的荷电状态除以低压电池40的容量。电池的容量是电池可存储的最大电量。
[0039]
负载98包括控制模块36以及其他类型的负载98,例如,电池能量控制模块60;高压
接触器116,所述高压接触器116用于电池能量控制模块60以控制流向dc/dc转换器38等的电力;混合动力传动系统控制模块58;发动机控制模块74;车身控制模块62;约束控制模块78;数据记录器118;空气调节系统120或空气调节系统120的部件或设置,诸如ac风扇或高速模式;附件控制模块80;风扇122,所述风扇122用于冷却发动机44;用于发动机44的电动水泵124;墙边插座(power point)126(即,乘客舱中的插口,以供乘客插入个人装置)(如图3a中全部所示);自主车辆平台接口控制模块72;防抱死制动控制模块64;第一动力转向控制模块66;碰撞缓解系统控制模块70(如图3b中全部所示);物体检测维护控制模块76;防抱死制动系统备用装置128;第二动力转向控制模块68;以及虚拟驾驶员模块34(如图3c中全部所示)。
[0040]
点火开关功率继电器130电耦接到基础配电板总线102。点火开关功率继电器130可通过来自车身控制模块62的信号在打开状态与关闭状态之间切换。车身控制模块62可通过来自点火或按钮起动(未示出)的信号来启用。点火开关功率继电器130被定位成在关闭时将电流从基础配电板总线102提供到发动机控制模块74、混合动力传动系统控制模块58、防抱死制动控制模块64以及动力转向控制模块66、68。混合动力传动系统控制模块58可将高压电池42从休眠状态启用到活动状态。在活动状态下,高压电池42可向动力传动系统84和dc/dc转换器38提供电压差。
[0041]
多个控制模块继电器132电耦接到主配电板总线104。控制模块继电器132通过来自计算机46的信号可在打开状态与关闭状态之间彼此独立地切换。控制模块继电器132可各自通过来自基础配电板总线102的电流来启用。每个控制模块继电器132被定位成在关闭时将来自主配电板总线104的电流提供到控制模块36(例如,如图3a至图3c所示,碰撞缓解系统控制模块70、自主车辆平台接口控制模块72)中的一者或虚拟驾驶员模块34。
[0042]
在正常操作中,负载98通常经由dc/dc转换器38供电而不从低压电池40汲取电力。低压电池40在产生来自负载98的瞬时需求的情况下供应电力以获得比dc/dc转换器38可供应的电力更大的电力。
[0043]
出于本公开的目的,“开启状态”被限定为其中向车辆30的电气部件(即,负载98)提供全部电能并且准备好驾驶车辆30(例如,发动机44正在运行)的车辆30的状态;“关闭状态”被限定为其中向车辆30的(通常在存放车辆30时使用的)选定负载98提供少量电能的车辆30的状态;并且“附件功率状态”被限定为其中与处于关闭状态相比、向更多的电气部件提供全部电能并且未准备好驾驶车辆30的车辆30的状态。通常,乘员在乘员将要驾驶车辆30时将车辆30置于开启状态,在乘员将要离开车辆30时将车辆30置于关闭状态,并且在乘员将要坐在车辆30中但不驾驶车辆30时将车辆30置于附件功率状态。
[0044]
图4是示出用于向配电系统100中的负载98提供电力的示例性过程400的过程流程图。计算机46的存储器存储用于执行过程400的步骤的可执行指令。作为过程400的总体概述,计算机46接收请求;在所述请求是在手动模式下起动车辆30的情形下,起动车辆30,向虚拟驾驶员模块34提供高电力以执行预驾驶测试,并且然后向虚拟驾驶员模块34提供低电力;在所述请求是在自主模式下起动车辆30的情形下,在虚拟驾驶员模块34执行预驾驶测试期间和之后两者起动车辆30并且向虚拟驾驶员模块34提供高电力;并且在所述请求是利用控制模块36中的一个执行操作(诸如下载)的情形下,将低压电池40用于使预期电力汲取低于阈值的操作,并且初始化高压电池42并将其用于使预期电力汲取高于阈值的操作。过
程400在车辆30处于关闭状态时发生。
[0045]
过程400在框405中开始,在框405中计算机46接收请求。所述请求是计算机46或控制模块36中的一个执行一个或多个动作的指令。所述请求可源自远程服务器,并且可经由收发器82和通信网络56传输到计算机46。
[0046]
接着,在决策框410中,计算机46确定所述请求是否是起动车辆30(即,将车辆30从关闭状态切换到开启状态)的请求,或者替代地,所述请求是否用于使控制模块36中的一个执行某一动作。计算机46读取请求的内容以进行确定。如果所述请求是起动车辆30,则过程400前进到框415。如果所述请求是用于使控制模块36中的一个执行动作,则过程400前进到框440。
[0047]
在框415中,计算机46将虚拟驾驶员模块34置于高电力汲取状态。出于本公开的目的,负载98的“高电力汲取状态”是负载98消耗相对高电力量的状态,并且负载98的“低电力汲取状态”是负载98消耗相对低电力量的状态。例如,计算机46可通过将耦接到辅助配电板总线106的dc/dc转换器38的设定点设定为第一电压(其为相对高的电压)来将虚拟驾驶员模块34置于高电力汲取状态。第一电压被选取为足够高以在例如如由虚拟驾驶员模块34的供应商、车辆30的制造商等所指定的自主模式下为虚拟驾驶员模块34供电。
[0048]
接着,在框420中,计算机46对车辆30执行至少一个预驾驶测试。出于本公开的目的,“预驾驶测试”是对车辆30系统的检查,所述检查发生在起动车辆30时,即在将车辆30从关闭状态或附件功率状态切换到接通状态时。
[0049]
例如,预驾驶测试可包括检查高压电池42和/或低压电池40的电量是否足够高以将车辆30置于最小风险状况。出于本公开的目的,“最小风险状况”具有由国家公路交通安全管理局(national highway traffic safety administration,nhtsa)和汽车工程师协会(society of automotive engineers,sae)赋予的含义:
“‘
最小风险状况
’
意指当系统发生故障时或者当人类驾驶员未能对接管动态驾驶任务的请求做出适当响应时自动驾驶系统自动采取的低风险工况。”(美国交通部和nhtsa,自动驾驶系统2.0:安全愿景(automated driving systems 2.0:a vision for safety),第26页(引用国际汽车工程师协会j3016标准(sae international j3016),道路机动车辆驾驶自动化系统相关术语的国际分类和定义(j3016:2016年9月)))。例如,将车辆30置于最小风险状况可以是发起切换至人类驾驶员或自主驾驶车辆30停在路边,即,将车辆30停在活跃的行车道之外。为了确定电量是否足够高以将车辆30置于最小风险状况,计算机46可确定电量是否高于存储在计算机46的存储器中的电量阈值。通过以实验的方式测试消耗了多少电量来将车辆30置于最小风险状况,选取电量阈值。
[0050]
对于另一示例,预驾驶测试可包括执行转向动作并确定来自传感器54中的转向角传感器的数据是否与转向动作匹配。计算机46可指示转向系统52利用存储在计算机46的存储器中的预设扭矩来使车轮86转弯,并且计算机46可检查从转向角传感器接收的角度是否在预存储转向角的阈值误差角内。预存储转向角被选取为对应于在施加预存储扭矩时车轮86的转向角,并且阈值误差角被选取为对应于转向角传感器的分辨率。
[0051]
对于另一示例,预驾驶测试可包括执行制动动作并确定来自传感器54的制动传感器的数据是否与制动动作匹配。计算机46可指示制动系统50利用存储在计算机46的存储器中的预设力来应用制动器,并且计算机46可检查由制动传感器报告的力是否在预设力的力
误差阈值内。力误差阈值被选取为对应于制动传感器的分辨率。
[0052]
接着,在决策框425中,计算机46确定起动车辆30的请求是在手动模式下还是在自主模式下起动车辆30的请求。出于框425的目的,半自主模式(如果可应用于车辆30的话)可被分类有手动模式或自主模式中的任一者,这取决于虚拟驾驶员模块34在半自主模式下的电力汲取是高电力汲取状态还是低电力汲取状态。替代地,半自主模式可被分类为导致中等电力汲取状态(未示出)的第三选项。计算机46读取请求的内容以进行确定。如果所述请求是在自主模式下起动车辆30,则过程400前进到框430。如果所述请求是在手动模式下起动车辆30,则过程400前进到框435。
[0053]
在框430中,计算机46使虚拟驾驶员模块34维持高电力汲取状态。因此,虚拟驾驶员模块34继续处于其在框415中被置于的高电力汲取状态。在框430之后,过程400结束。
[0054]
在框435中,计算机46将虚拟驾驶员模块34置于低电力汲取状态。例如,计算机46可通过将耦接到辅助配电板总线106的dc/dc转换器38的设定点设定为第二电压(其为相对低的电压)来将虚拟驾驶员模块34置于低电力汲取状态。第二电压被选取为足够高以在手动模式而不是自主模式下为虚拟驾驶员模块34供电。第二电压低于第一电压。在框435之后,过程400结束。
[0055]
在框440中,计算机46选择要激励的控制模块36和/或配电板总线102、104、106以便使预期电力需求最小化。例如,如果所述请求是下载到碰撞缓解系统控制模块70,则计算机46可打开通向碰撞缓解系统控制模块70的控制模块继电器132,由此可从基础配电板总线102向所述控制模块继电器132供应电力而无需启用主配电板总线104。对于另一示例,如果所述请求是下载到对象检测维护控制模块76,则计算机46可启用辅助配电板总线106而无需启用主配电板总线104。
[0056]
接着,在框445中,计算机46确定预期电力需求以用于完成动作。例如,如果动作是从远程服务器下载到控制模块36中的一个,则预期电力需求可被估计为完成下载的预期持续时间和在下载状态中控制模块36以及在框440中选择的任何其他活动部件的耗电速率。可基于文件大小和当前带宽来估计预期持续时间,所述当前带宽可以是收发器82与远程服务器之间的网络带宽、收发器82的带宽以及通信网络56的带宽中的最小带宽。文件大小可包括在所述请求中。可通过实验的方式确定在下载状态下控制模块36以及对应的其他部件的耗电速率,并将其存储在计算机46的存储器中。
[0057]
接着,在决策框450中,计算机46确定电耦接到接收下载的控制模块36的低压电池40中的电量是否高于阈值。选取阈值以确定低压电池40是否具有足够的电量来完成下载。阈值可以是如在框440中确定的预期电力需求和用来起动车辆30的电量的总和。可以实验方式确定用来起动车辆30的电量并且将其存储在计算机46的存储器中。如果低压电池40的电量高于阈值,则过程400前进到框460。如果低压电池40的电量低于阈值,则过程400前进到框455。
[0058]
在框455中,计算机46从相应的低压电池40向控制模块36提供电力以用于使控制模块36完成动作。高压电池42保持处于休眠状态。在框455之后,过程400结束。
[0059]
在框460中,计算机46初始化高压电池42,即,将高压电池42从休眠状态切换到活动状态。例如,计算机46可指示点火开关功率继电器130打开混合动力传动系统控制模块58,并且混合动力传动系统控制模块58可初始化高压电池42。
[0060]
接着,在框465中,计算机46可从高压电池42向控制模块36提供电力。例如,计算机46可基于电力需求将耦接到相应的配电板总线102、104、106的dc/dc转换器38的设定点设定为某一电压。可确定dc/dc转换器38的设定点的电压以提供足够的电力来完成动作。在框465之后,过程400结束。
[0061]
一般来说,所述的计算系统和/或装置可采用多个计算机操作系统中的任一个,包括但绝不限于以下版本和/或种类:ford应用、applink/smart device link中间件、microsoft操作系统、microsoft操作系统、unix操作系统(例如,由加州红杉海岸的oracle公司发布的操作系统)、由纽约阿蒙克市的international business machines公司发布的aix unix操作系统、linux操作系统、由加州库比蒂诺的苹果公司发布的mac osx和ios操作系统、由加拿大滑铁卢的黑莓有限公司发布的blackberry os以及由谷歌公司和开放手机联盟开发的android操作系统、或由qnx software systems供应的car信息娱乐平台。计算装置的示例包括但不限于车载计算机、计算机工作站、服务器、台式机、笔记本、膝上型计算机或手持计算机或者一些其他计算系统和/或装置。
[0062]
计算装置通常包括计算机可执行指令,其中所述指令可由诸如以上列出的计算装置的一个或多个计算装置执行。可由使用多种编程语言和/或技术创建的计算机程序编译或解译计算机可执行指令,所述编程语言和/或技术单独地或者组合地包括但不限于java
tm
、c、c++、matlab、simulink、stateflow、visual basic、java script、python、perl、html等。这些应用中的一些可在虚拟机(诸如java虚拟机、dalvik虚拟机等)上编译和执行。一般来说,处理器(例如,微处理器)接收来自例如存储器、计算机可读介质等的指令并且执行这些指令,从而执行一个或多个过程,包括本文所描述过程中的一个或多个。可使用各种计算机可读介质来存储和传输此类指令和其他数据。计算装置中的文件通常是存储在诸如存储介质、随机存取存储器等计算机可读介质上的数据集合。
[0063]
计算机可读介质(也称为处理器可读介质)包括参与提供可由计算机(例如,由计算机的处理器)读取的数据(例如,指令)的任何非暂时性(例如,有形)介质。这种介质可采取许多形式,包括但不限于非易失性介质和易失性介质。非易失性介质可包括例如光盘或磁盘以及其他持久性存储器。易失性介质可包括例如通常构成主存储器的动态随机存取存储器(dram)。此类指令可由一种或多种传输介质传输,所述一种或多种传输介质包括同轴电缆、铜线和光纤,包括有包括耦接到ecu的处理器的系统总线的线。计算机可读介质的常见形式包括例如软盘、软磁盘、硬盘、磁带、任何其他磁性介质、cd-rom、dvd、任何其他光学介质、穿孔卡片、纸带、任何其他具有孔图案的物理介质、ram、prom、eprom、flash-eeprom、任何其他存储器芯片或盒式磁带,或计算机可从中读取的任何其他介质。
[0064]
数据库、数据存储库或本文所描述的其他数据存储装置可包括用于存储、访问和检索各种数据的各种机构,包括分层数据库、文件系统中的文件集、专用格式的应用程序数据库、关系型数据库管理系统(rdbms)、非关系型数据库(nosql)、图形数据库(gdb)等。每个这样的数据存储装置总体上包括在采用诸如以上提及那些中的一种的计算机操作系统的计算装置内,并且以多种方式中的任一种或多种经由网络来访问。文件系统可从计算机操作系统访问,并且可包括以各种格式存储的文件。rdbms除了用于创建、存储、编辑和执行已
存储的程序的语言(诸如上述pl/sql语言)之外还通常采用结构化查询语言(sql)。
[0065]
在一些示例中,系统元件可被实施为一个或多个计算装置(例如,服务器、个人计算机等)上、存储在与计算装置相关联的计算机可读介质(例如,磁盘、存储器等)上的计算机可读指令(例如,软件)。计算机程序产品可包括存储在计算机可读介质上的用于执行本文所描述功能的此类指令。
[0066]
在附图中,相同的附图标记指示相同的元素。此外,可改变这些元素中的一些或全部。关于本文所描述的介质、过程、系统、方法、启发等,应当理解,虽然此类过程等的步骤已被描述为根据某一有序顺序发生,但此类过程可在以与本文所描述次序不同的次序执行所描述步骤的情况下来实践。还应当理解,可同时执行某些步骤,可添加其他步骤,或者可省略本文所描述的某些步骤。
[0067]
除非本文作出相反的明确指示,否则权利要求中使用的所有术语意图给出如本领域技术人员所理解的普通和通常的含义。特别地,诸如“一个”、“该”、“所述”等单数冠词的使用应被解读为叙述所指示的元素中的一个或多个,除非权利要求叙述相反的明确限制。形容词“第一”和“第二”贯穿本文档用作标识符,并且不意图表示重要性、次序或数量。
[0068]
已经以说明性方式描述了本公开,并且应理解,已经使用的术语旨在具有描述性词语而非限制性词语的性质。鉴于以上教导,本公开的许多修改和变化是可能的,并且本公开可以不同于具体地描述的其他方式实践。
[0069]
根据本发明,提供一种系统,其具有:虚拟驾驶员模块;dc/dc转换器,所述dc/dc转换器电耦接到所述虚拟驾驶员模块;低压电池,所述低压电池电耦接到所述虚拟驾驶员模块;高压电池,所述高压电池电耦接到所述dc/dc转换器;和计算机,所述计算机可通信地耦接到所述dc/dc转换器;其中所述计算机被编程为响应于在手动模式下起动包括所述虚拟驾驶员模块的车辆的请求,在所述请求时所述车辆处于关闭状态,将所述dc/dc转换器的设定点设定为第一电压;然后对所述车辆执行至少一个预驾驶测试;并且然后将所述dc/dc转换器的所述设定点设定为低于所述第一电压的第二电压。
[0070]
根据本发明,提供一种系统,其具有:计算机,所述计算机包括处理器和存储指令的存储器,所述指令可由所述处理器执行以:响应于在手动模式下起动车辆的请求,在所述请求时所述车辆处于关闭状态,将虚拟驾驶员模块置于高电力汲取状态;然后对所述车辆执行至少一个预驾驶测试;并且然后将所述虚拟驾驶员模块置于低电力汲取状态。
[0071]
根据一个实施例,本发明的进一步特征在于dc/dc转换器,所述dc/dc转换器电耦接到所述虚拟驾驶员模块并且可通信地耦接到所述计算机,其中将所述虚拟驾驶员模块置于所述高电力汲取状态是将所述dc/dc转换器的设定点设定为第一电压,并且将所述虚拟驾驶员模块置于所述低电力汲取状态是将所述dc/dc转换器的所述设定点设定为低于所述第一电压的第二电压。
[0072]
根据一个实施例,执行所述预驾驶测试包括以下中的至少一项:确定电池的电量是否足够高以将所述车辆置于最小风险状况;执行转向动作并确定来自转向角传感器的数据是否与所述转向动作匹配;或者执行制动动作并确定来自制动传感器的数据是否与所述制动动作匹配。
[0073]
根据一个实施例,所述指令还包括响应于在所述车辆处于所述关闭状态时控制模块对动作的请求,在确定低压电池的电量低于基于所述动作的电力需求的阈值时从所述低
压电池向所述控制模块提供电力的指令。
[0074]
根据一个实施例,所述指令还包括响应于在所述车辆处于所述关闭状态时所述控制模块对所述动作的所述请求,初始化高压电池并且在确定所述低压电池的所述电量高于所述阈值时从所述高压电池向所述控制模块提供电力的指令。
[0075]
根据一个实施例,本发明的进一步特征在于dc/dc转换器,所述dc/dc转换器电耦接到所述控制模块并且可通信地耦接到所述计算机,其中从所述高压电池向所述控制模块提供电力包括基于所述动作的所述电力需求来设定所述dc/dc转换器的设定点。
[0076]
根据一个实施例,所述动作是下载所述控制模块的更新。
[0077]
根据本发明,一种方法包括:响应于在手动模式下起动车辆的请求,在所述请求时所述车辆处于关闭状态,将虚拟驾驶员模块置于高电力汲取状态;然后对所述车辆执行至少一个预驾驶测试;以及然后将所述虚拟驾驶员模块置于低电力汲取状态。
[0078]
根据一个实施例,将所述虚拟驾驶员模块置于所述高电力汲取状态是将电耦接到所述虚拟驾驶员模块的dc/dc转换器的设定点设定为第一电压,并且将所述虚拟驾驶员模块置于所述低电力汲取状态是将所述dc/dc转换器的所述设定点设定为低于所述第一电压的第二电压。
[0079]
根据一个实施例,执行所述预驾驶测试包括以下中的至少一项:确定电池的电量是否足够高以将所述车辆置于最小风险状况;执行转向动作并确定来自转向角传感器的数据是否与所述转向动作匹配;或者执行制动动作并确定来自制动传感器的数据是否与所述制动动作匹配。
[0080]
根据一个实施例,本发明的进一步特征在于响应于在所述车辆处于所述关闭状态时控制模块对动作的请求,在确定低压电池的电量低于基于所述动作的电力需求的阈值时从所述低压电池向所述控制模块提供电力。
[0081]
根据一个实施例,本发明的进一步特征在于响应于在所述车辆处于所述关闭状态时所述控制模块对所述动作的所述请求,初始化高压电池并且在确定所述低压电池的所述电量高于所述阈值时从所述高压电池向所述控制模块提供电力。
[0082]
根据一个实施例,从所述高压电池向所述控制模块提供电力可包括基于所述动作的所述电力需求来设定电耦接到所述控制模块的dc/dc转换器的设定点。
[0083]
根据一个实施例,所述动作是下载所述控制模块的更新。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips