
 商标分类
商标分类  商标转让
商标转让 
一种基于自动驾驶平台的数据采集系统的制作方法
 2021-02-03 13:02:53|
2021-02-03 13:02:53| 419|
419| 起点商标网
起点商标网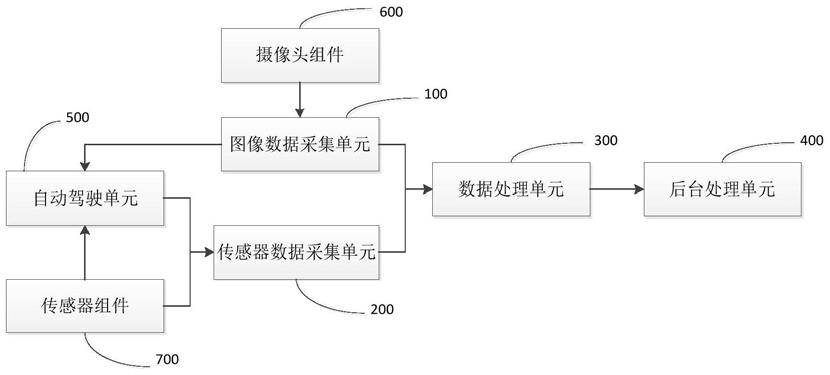
[0001]
本申请涉及汽车电子技术领域,更具体地,涉及一种基于自动驾驶平台的数据采集系统。
背景技术:
[0002]
随着汽车工业的快速发展,车辆普及率显著提高,未来车辆发展将越来越高度智能化,无人化,这些都离不开车载传感器的支持。
[0003]
从高级辅助驾驶adas到无人驾驶的一路发展,车载传感器越来越多,主要包括,摄像头传感器,全球定位模块gnss,惯性测量单元imu,激光雷达传感器,毫米波雷达传感器,超声波雷达传感器等。这些车载传感器为汽车的智能驾驶,无人驾驶提供了必要的条件。
[0004]
由于传感器相当于车辆的感官部件,根据功能的需求,分配在车辆上的固定位置,基于算法的要求,这些位置不能随便移动。目前各家平台开发的自动驾驶平台系统算法验证,大部分直接安装在汽车上,根据应用场景去验证测试。而测试过程的数据采集,对于验证过程中的发现的问题复现尤其重要,对于数据采集,一般的做法有:
[0005]
其一,一套传感器接一个自动驾驶平台,自动驾驶平台给采集系统提供数据
[0006]
自动驾驶平台在运行算法资源的同时,预留一部分硬件资源给数据采集系统,将采集到的数据,经过自动驾驶平台内部软件资源处理后,通过外部高速以太网,usb3.0接口,pcie等接口保持传感器的数据信息。这种方案简单,容易实现,对于自动驾驶平台还没大批量量产时,比较使用,但如果未来自动驾驶产量大时,预留的硬件接口,占用的软件资源,对产品本身,是一种成本的极度浪费。
[0007]
其二,车上安装两套传感器,一套接自动驾驶平台,一套接数据采集系统。
[0008]
实际应用自动驾驶平台只需要一套传感器,另外一套传感器给数据采集系统,但量产后不需要;而且两套传感器安装的位置,可能也会有偏差,导致实测数据和采集数据不一致,影响判断的情况出现。
[0009]
专利《cn201811000077.3一种自动驾驶数据采集系统及其工作方法》公开了一种自动驾驶数据采集系统,以行车记录仪的方式,结合云端系统实现数据的采集,实现数据的采集。该方案相当于在自动驾驶平台上,增加了一个数据采集功能,增加自动驾驶平台的算力资源,需要额外增加硬件资源,而目前大部分客户的自动驾驶平台还没有需要增加数据采集的功能,这样就导致产品的成本上升。
技术实现要素:
[0010]
本申请为克服现有技术中在进行数据采集的同时,自动驾驶平台系统需要分配一部分系统资源给数据采集系统,导致自动驾驶平台整体性能下降,或增加成本的问题,本申请提供一种基于自动驾驶平台的数据采集系统。
[0011]
一种基于自动驾驶平台的数据采集系统,应用于设置有自动驾驶单元及多个传感器组件的汽车电子产品中,所述系统包括相互连接的图像数据采集单元、传感器数据采集
单元、数据处理单元、以及后台处理单元,其中,
[0012]
所述图像数据采集单元,连接在摄像头组件与自动驾驶单元之间,用于获取并处理所述摄像头组件的图像数据;
[0013]
所述传感器数据采集单元,与所述汽车电子产品的can总线或以太网连接,用于获取传感器组件和自动驾驶单元的传感器数据;
[0014]
所述数据处理单元,用于接收并处理所述图像数据、所述传感器数据;
[0015]
所述后台处理单元,用于存储通过所述数据处理单元处理的图像数据和传感器数据。
[0016]
可选地,所述数据处理单元包括数据处理芯片,所述数据处理芯片通过与所述图像数据采集单元获取图像数据、与所述传感器数据采集单元连接获取传感器数据;并将所述图像数据、所述传感器数据进行打包,并增加时间标识,生成数据包,传输到后台处理单元进行储存。
[0017]
可选地,所述后台处理单元为外部工控机或储存器,所述数据处理芯片通过pcie接口与所述后台处理单元连接。
[0018]
可选地,所述后台处理单元对所述数据包进行数据分析或模拟仿真或数据库调用或数据储存。
[0019]
可选地,所述图像数据采集单元包括与所述摄像头组件连接的连接器、与所述自动驾驶单元连接的串行器、以及与所述连接和串行器连接的数据转移芯片;其中,
[0020]
所述连接器,用于获取并解码图像数据;
[0021]
所述数据转移芯片,用于复制所述图像数据,并将所述图像数据传输到串行器和所述数据处理单元中;
[0022]
所述串行器,用于将所述图像数据进行转码,串行输出到自动驾驶平台。
[0023]
可选地,所述连接器为解串器或以太网模块或cvbs模块或hsd模块或usb模块。
[0024]
可选地,所述传感器数据采集单元包括与集线器,所述集线器通过can总线分别与传感器组件和自动驾驶单元连接,用于获取传感器数据。
[0025]
可选地,所述传感器至少包括tbox模组、导航模组、雷达模组的一种或多种。
[0026]
可选地,所述自动驾驶平台还通过gpio接口与超声波模组连接,所述自动驾驶平台接收所述超声波模组的超声波数据,通过分析解码超声波的距离信息,并将原超声波数据整理打包,通过can总线发送到传感器数据采集单元。
[0027]
可选地,所述后台处理单元还用于数据回放,所述数据回放包括以下步骤:
[0028]
所述后台处理单元将所述任一时刻的数据包,发送到所述数据处理单元;
[0029]
所述数据处理单元将所述数据包进行转码生成图像数据、传感器数据,且将图像数据通过图像数据采集单元回传到自动驾驶单元,将传感器数据通过传感器数据采集单元传到自动驾驶单元;
[0030]
所述自动驾驶单元根据所述图像数据、传感器数据还原该时刻的场景。
[0031]
与现有技术相比,本申请的有益效果是:本申请基于车身的一套传感器的基础上设置数据采集系统,避免自动驾驶平台占用额外的算力与硬件资源,数据采集系统也可以正常使用,同时同一套传感器也保证采集数据与测试过程中数据一致;同时,自动驾驶平台与数据采集系统独立性强,产品量产时,可以直接取消数据采集系统,兼容性,灵活性强。
附图说明
[0032]
图1为本申请实施例的方法的示意图。
[0033]
图2为本申请实施例的数据回放的示意图。
具体实施方式
[0034]
下面结合具体实施方式对本申请作进一步的说明。
[0035]
本申请实施例的附图中相同或相似的标号对应相同或相似的部件;在本申请的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制。
[0036]
此外,若有“第一”、“第二”等术语仅用于描述目的,主要是用于区分不同的装置、元件或组成部分(具体的种类和构造可能相同也可能不同),并非用于表明或暗示所指示装置、元件或组成部分的相对重要性和数量,而不能理解为指示或者暗示相对重要性。
[0037]
在如图1所示的实施例中,本申请提供了一种基于自动驾驶平台的数据采集系统,应用于设置有自动驾驶单元500及多个传感器组件的汽车电子产品中,本系统包括相互连接的图像数据采集单元100、传感器数据采集单元200、数据处理单元300、以及后台处理单元400,其中,
[0038]
图像数据采集单元100,连接在摄像头组件600与自动驾驶单元500之间,用于获取并处理摄像头组件600的图像数据;在本实施例中,图像数据采集单元100包括与摄像头组件600连接的连接器、与自动驾驶单元500连接的串行器、以及与连接和串行器连接的数据转移芯片;其中,连接器,用于获取并解码图像数据;数据转移芯片,用于复制图像数据,并将图像数据传输到串行器和数据处理单元300中;串行器,用于将图像数据进行转码,串行输出到自动驾驶平台。
[0039]
传感器数据采集单元200,与汽车电子产品的can总线或以太网连接,用于获取传感器组件700和自动驾驶单元500的传感器数据;在本实施例中,传感器数据采集单元200包括集线器,集线器通过can总线分别与传感器和自动驾驶单元500连接,用于获取传感器数据。
[0040]
数据处理单元300,用于接收并处理图像数据、传感器数据;在本实实施例中,数据处理单元300包括数据处理芯片,数据处理芯片通过与图像数据采集单元100获取图像数据、与传感器数据采集单元200连接获取传感器数据;并将图像数据、传感器数据进行打包,并增加时间标识,生成数据包,传输到后台处理单元400进行储存。
[0041]
后台处理单元400,用于处理通过数据处理单元300处理的图像数据和传感器数据。在本实施例中,后台处理单元400为外部工控机,数据处理芯片通过pcie接口与后台处理单元400连接。
[0042]
本申请基于车身的一套传感器的基础上设置数据采集系统,避免自动驾驶平台占用额外的算力与硬件资源,数据采集系统也可以正常使用,同时同一套传感器也保证采集数据与测试过程中数据一致;同时,自动驾驶平台与数据采集系统独立性强,产品量产时,可以直接取消数据采集系统,兼容性,灵活性强。
[0043]
在一些实施例中,数据处理单元300包括数据处理芯片,数据处理芯片通过与图像数据采集单元100获取图像数据、与传感器数据采集单元200连接获取传感器数据;并将图像数据、传感器数据进行打包,并增加时间标识,生成数据包,传输到后台处理单元400进行储存。在本实施例中,数据处理芯片将图像数据、传感器数据转化为储存器或工控机能够识别的二进制报文,并在二进制报文上添加时间标识,传输到储存器中。
[0044]
在一些实施例中,可选地,后台处理单元为外部工控机或储存器,数据处理芯片通过pcie接口与所述后台处理单元连接。后台处理单元对数据包进行数据分析或模拟仿真或数据库调用或数据储存。数据处理芯片通过pcie接口与后台处理单元400连接;储存于后台处理单元400的数据包用于后期数据分析或模拟仿真或数据库调用。此外,本申请的后台处理单元400也可以是硬盘等存储介质。
[0045]
在一些实施例中,图像数据采集单元100包括与摄像头组件600连接的连接器、与自动驾驶单元500连接的串行器、以及与连接和串行器连接的数据转移芯片;其中,连接器,用于获取并解码图像数据;其中,连接器为解串器或以太网模块或cvbs模块或hsd模块或usb模块。数据转移芯片,用于复制图像数据,并将图像数据传输到串行器和数据处理单元300中;串行器,用于将图像数据进行转码,串行输出到自动驾驶平台。在本实施例中,本申请的图像采集单元通过解串器对从摄像头组件600获取图像数据进行解码;其中,摄像头组件600设置有串行器且通过串行器将图像数据串行输出到图像数据采集单元100中,图像数据通过解串器进入数据转移芯片,解串器通过can总线与摄像头组件600连接,数据转移芯片复制图像数据,通过串行器将图像数据传输到自动驾驶单元500,自动驾驶单元500的解串器对图像数据解码对通过自动驾驶芯片进行处理。数据转移芯片还将图像数据复制后通过高速总线传输给数据处理单元300,数据处理单元300将图像数据整理打包,增加时间标识,将图像数据传输到工控机电脑,电脑采集数据对图像数据进行保存。
[0046]
在一些实施例中,传感器数据采集单元200包括集线器,集线器通过can总线分别与传感器和自动驾驶单元500连接,用于获取传感器数据。传感器至少包括tbox模组、导航模组、雷达模组的一种或多种。在本实施例中,can总线的特点可以支持多点设备同时接入,can总线的设备如雷达输出距离信息,tbox/gnss输出位置信息等;传感器数据采集单元200通过与can总线连接获取距离、位置等信息。其中,传感器组件700通过硬件电缆分成两部分,一部分连接在自动驾驶单元500,另一部分通过can总线连接在传感器数据采集单元200中,传感器数据采集单元200的集线器接收到can总线中的传感器数据后,将传感器数据传输到数据处理单元300,由数据处理单元300进行整理打包,增加时间标识,并传输给工控机电脑,有工控机电脑进行保存。
[0047]
在一些实施例中,自动驾驶平台还通过gpio接口与超声波模组连接,自动驾驶平台接收超声波模组的超声波数据,通过分析解码超声波的距离信息,并将原超声波数据整理打包,通过can总线发送到传感器数据采集单元200。在本实施例中,超声波传感器通过gpio接口向自动驾驶单元500输出距离信息,自动驾驶单元500接收距离信息,进行分析解码;并将原超声波的数据进行整理打包通过can或者以太网或者usb等接口传输到传感器数据采集单元200中。
[0048]
在一些实施例中,参见图2,后台处理单元还用于数据回放,所述数据回放包括以下步骤:后台处理单元将所述任一时刻的数据包,发送到数据处理单元;数据处理单元将数
据包进行转码生成图像数据、传感器数据,且将图像数据通过图像数据采集单元回传到自动驾驶单元,将传感器数据通过传感器数据采集单元传到自动驾驶单元;自动驾驶单元根据图像数据、传感器数据还原该时刻的场景。在本实施例中,本数据采集系统除了数据采集功能,还支持数据回放功能。采集的的数据通过工控机处理后,通过数据处理单元300,回传给数据转移芯片,通过串行器,解串器回传到自动驾驶单元500;数据处理单元300也可以通过传感器数据采集单元200将数据通过can总线,以太网回传给自动驾驶单元500,达到改善软件算法,精准解决实测测试过程中遇到的问题的效果。在数据回放阶段,所有的外部传感器都不连接,自动驾驶平台脱离车辆,在工作室就可以接收原传感器的信息,工控机电脑将之前采集到的数据,根据时间标识,做好数据同步分类保存,将数据信息通过原自动驾驶平台接口回放到自动驾驶平台,自动驾驶平台通过运行之前采集的数据,来改善算法训练和测试校验等
[0049]
在一些实施例中,数据采集系统,连接在摄像头模组与自动驾驶平台之间,自动驾驶平台,外部传感器包括摄像头模组,tbox、导航模组、雷达模组、超声波模组等位置均保持原位置不变。
[0050]
本申请的数据采集系统具有以下特点:内置摄像头的串行解串器,数据转移芯片,数据处理芯片,一个集线器,一个工控机电脑采集设备。摄像头模组通过同轴线缆与数据采集系统连接,并将摄像头的数据通过串行器串化,传给数据采集系统的解串器,这里的串行器,解串器只是摄像头传输的其中一种方式,也包括其他传输方式,如以太网、cvbs、hsd、usb等。解串器可以将摄像头的模组数据解码出来,传输给数据转移芯片,数据转移芯片收到解码出来的数据后,传输给数据处理芯片,同时复制一份数据同串行器;数据采集系统的串行器将收到的数据重新打包通过同轴线缆传输给自动驾驶平台,这个串行器由自动驾驶平台的解串器通过同轴线控制;外部模块的tbox、gnss、雷达模组等通过can总线接口接入,can总线可以支持多个节点,一路给自动驾驶平台,一路接数据采集系统的集线器;超声波模组通常使用的是gpio接口方式,直接接入数据采集系统,会增加其工作量,将超声波模组gpio信号经过自动驾驶单元500处理后,以can的方式输出,传输到数据采集系统,这部分数据处理不会占用自动驾驶芯片的算力资源;集线器除了可以直接can接口,也支持以太网接口;数据处理芯片与工控机电脑通过pcie接口连接或也其他高速总线,工控机电脑负责数据的采集部分,如果不需要工控机电脑,也可以由数据处理芯片将数据传到其他存储设备如硬盘等;工控机电脑将采集到的数据用于后期的数据分析,模拟仿真,数据库调用;数据采集系统除了数据采集功能,还支持数据回放功能。采集的的数据通过工控机处理后,通过数据处理芯片,回传给数据转移芯片,通过串行器,解串器回传到自动驾驶平台;数据处理芯片也可以通过集线器将数据通过can总线,以太网回传给自动驾驶平台,达到改善软件算法,精准解决实测测试过程中遇到的问题的效果。其中,数据转移芯片,实现将一路图像数据进,两路图像输出,可以理解为同时复制两路输出,一般fpga芯片有这种功能,可选用型号为machxo3lf-4300或lif-md6000的芯片。数据处理芯片可选用型号为xilinx artix-7或zynqultrascale+的芯片。串行器用于发送一般放在摄像头内部,作为数据的输出,其型号:max9295a或ds90ub935等;解串器用于接收,一般放在自动驾驶单元,数据采集单元,其型号max9296,ds90ub954等。集线器负责收集从can总线传输过来的数据,从自动驾驶单元输出的数据,一般的32bit mcu芯片搭配相关收发器就可以,其芯片可以为瑞莎rh850系列或nxp
的sv232系列的芯片。
[0051]
本申请基于车身的一套传感器的基础上设置数据采集系统,避免自动驾驶平台占用额外的算力与硬件资源,数据采集系统也可以正常使用,同时同一套传感器也保证采集数据与测试过程中数据一致;同时,自动驾驶平台与数据采集系统独立性强,产品量产时,可以直接取消数据采集系统,兼容性,灵活性强。
[0052]
显然,本申请的上述实施例仅仅是为清楚地说明本申请所作的举例,而并非是对本申请的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本申请的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本申请权利要求的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips