
 商标分类
商标分类  商标转让
商标转让 
全景泊车影像系统的制作方法
 2021-02-03 13:02:51|
2021-02-03 13:02:51| 329|
329| 起点商标网
起点商标网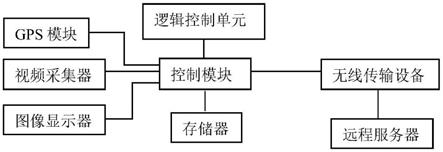
[0001]
本发明涉及汽车电子领域和机器视觉领域,特别涉及一种全景泊车影像系统。
背景技术:
[0002]
随着居民汽车持有量的增多,对泊车的智能化需求越来越高,全景泊车影像系统应运而生,全景倒车影像系统是一套通过车载显示屏幕观看汽车四周360度全景融合,超宽视角,无缝拼接的适时图像信息(鸟瞰图像),了解车辆周边视线盲区,帮助汽车驾驶员更为直观、更为安全地停泊车辆的泊车辅助系统,有别于市面上把汽车四周画面在显示屏幕上进行分割显示的“全景”系统,它是后视倒车影像系统的升级换代产品,是最新的真正意义上的“全景倒车影像系统”。但目前的全景泊车影像系统智能化程度不高,在实际应用中仅能发挥最基本的泊车辅助功能。
技术实现要素:
[0003]
本发明的目的在于针对现有技术中全景泊车影像系统的问题,提供一种智能化程度较高的全景泊车影像系统,能够全方位获取汽车的周边视频图像数据,并能在远程根据需要调用该视频图像数据。
[0004]
本发明提供一种全景泊车影像系统,具有广角镜头的视频采集器、控制模块、存储器、逻辑控制单元、无线传输设备和图像显示器,所述视频采集器分别固定安装在车身的前、后、左、右及车顶外表面上,所述视频采集器、存储器、逻辑控制单元、无线传输设备和图像显示器均与控制模块连接,所述视频采集器对车体周围状况进行视频采集并将采集所得数据传输给控制模块,控制模块将所述视频采集器的视频数据输入畸变模型进行图像畸变校正,校正后再根据各视频采集器安装的三维坐标及汽车尺寸将各方向的图像拼接在第一图像数据中,其中前后左右方向的图像拼接在第二图像数据中,所述第一图像数据包括前后左右及车顶方向的图像数据;通过直方图均衡化算法将拼接区域之间存在的亮度不同的部分消除,控制模块将处理完成后的第二图像数据发送到图像显示器进行显示;所述控制模块出现故障时,其上所运行的进程由所述逻辑控制单元继续执行接管;系统还包括与控制模块连接的gps模块,用于对汽车的定位,所述控制模块将所述gps模块获得的位置数据与所述第一图像数据、第二图像数据关联处理后存储到存储器中,同时通过所述无线传输设备发送到远程服务器进行存储,存储在存储器或服务器内的数据都标记有相应的时间;所述存储器定期被所述控制模块进行数据清理以释放空间;所述图像畸变校正至少包括以下步骤:获取原始畸变图上像素点的位置(x0,y0),通过公式x0=x(1+k1r2+k2r4+k3r6)及y0=y(1+k1r2+k2r4+k3r6),获取校正后的新位置(x,y);其中k1、k2、k3为畸变参数;其中r2=x2+y2。
[0005]
本发明通过获取汽车五个方向的视频图像数据,可供用户更全方位的获取汽车周围环境数据,真正避免视觉死角,本发明通过将视频图像数据与gps定位数据及时间相关联,可供用户根据需要获取某一时刻汽车的位置及当时周围环境的视频图像数据,此外,本
发明为避免控制模块出现故障而采用了可以随时替代其功能的逻辑控制单元,增加了全景泊车系统的稳定性。
[0006]
进一步的,系统还包括与所述远程服务器连接的终端,远程用户可根据需要通过所述终端调用所述服务器内与所述汽车有关的数据。通过终端的使用可方便用户在任意地方随时获取汽车相关的全景视频图像数据。
[0007]
进一步的,所述终端调用所述远程服务器内数据之前需经过id认证;所述汽车有关的数据仅对预设的id开放权限。通过id的认证可增强汽车数据的安全性。
附图说明
[0008]
下面结合附图和实施例对本发明进一步地说明;
[0009]
图1为本发明实施例的系统结构示意图
具体实施方式
[0010]
本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
[0011]
在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0012]
在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
[0013]
本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
[0014]
本发明提供一种全景泊车影像系统,具有广角镜头的视频采集器、控制模块、存储器、逻辑控制单元、无线传输设备和图像显示器,所述视频采集器分别固定安装在车身的前、后、左、右及车顶外表面上,所述视频采集器、存储器、逻辑控制单元、无线传输设备和图像显示器均与控制模块连接,连接关系参见附图图1;所述视频采集器对车体周围状况进行视频采集并将采集所得数据传输给控制模块,控制模块将所述视频采集器的视频数据输入畸变模型进行图像畸变校正,校正后再根据各视频采集器安装的三维坐标及汽车尺寸将各方向的图像拼接在第一图像数据中,其中前后左右方向的图像拼接在第二图像数据中,所述第一图像数据包括前后左右及车顶方向的图像数据;通过直方图均衡化算法将拼接区域之间存在的亮度不同的部分消除,控制模块将处理完成后的第二图像数据发送到图像显示器进行显示;所述控制模块出现故障时,其上所运行的进程由所述逻辑控制单元继续执行接管;系统还包括与控制模块连接的gps模块,用于对汽车的定位,连接关系参见附图图1,所述控制模块将所述gps模块获得的位置数据与所述第一图像数据、第二图像数据关联处
理后存储到存储器中,同时通过所述无线传输设备发送到远程服务器进行存储,存储在存储器或服务器内的数据都标记有相应的时间;所述存储器定期被所述控制模块进行数据清理以释放空间;所述图像畸变校正至少包括以下步骤:获取原始畸变图上像素点的位置(x0,y0),通过公式x0=x(1+k1r2+k2r4+k3r6)及y0=y(1+k1r2+k2r4+k3r6),获取校正后的新位置(x,y);其中k1、k2、k3为畸变参数;其中r2=x2+y2。
[0015]
本发明有别于现有技术中只获取汽车前后左右的视频图像数据,创造性的提出获取车顶方向上的视频图像数据并与当时汽车的gps位置数据相关联,使得汽车在发生前后左右视频采集器视觉死角产生的意外时,可获取当时的视频图像数据,还原当时的意外事实,为追宗溯源提供了证据。
[0016]
本发明的图像畸变校正前还可以先分析产生畸变的原因并对其在图像平面产生的效果建立相应的数学模型。本发明的上述图像畸变校正方法简单易行。本发明的图像畸变校正的具体实现方式还可以为:对输出图的点做遍历,以1080p的图像为例,从点(0,0)到点(1909,1069),逐行遍历,依次找到输出点(x,y)对应的原图点(x0,y0)的像素值,再将(x0,y0)的值赋给(x,y)。如果计算出来的对应的原始畸变图上像素点的位置(x0,y0)不是整数,则用二次线性插值计算此点,然后赋值给(x,y)。
[0017]
本发明还包括与所述远程服务器连接的终端,远程用户可根据需要通过所述终端调用所述服务器内与所述汽车有关的数据。具体应用时,远程用户可以是保险公司的理赔专员,其根据汽车车主的理赔需求调用远程服务器内的汽车视频图像数据,根据该数据进行理赔核实评估。本发明将汽车前后左右的视频图像数据显示在车上的图像显示器中,供车主在泊车时实时获取停车相关数据实现安全停车,将前后左右及顶上的数据发送到远程服务器,供有需要的用户可远程随时调用该数据。
[0018]
本发明的控制模块在获取视频采集器视频图像数据的时间、发送到所述图像显示器或远程服务器的时间在此都不做限制。
[0019]
本发明的所述终端调用所述远程服务器内数据之前需经过id认证;所述汽车有关的数据仅对预设的id开放权限。通过id的认证可增强汽车数据的安全性。具体应用时,由于汽车的实时环境数据也属于一种隐私数据,为避免非法用户调用该数据,本发明对调用该数据的用户都进行id认证,只有认证通过的id才可获取到该汽车的环境数据。为此,本发明的所述汽车与预设的id关联,一辆汽车可以与一个或多个预设id相关联,与所述预设的id相关联的汽车实质为与该汽车唯一的身份识别码相关联,所述身份识别码例如其发动机号码等。
[0020]
综上所述,本发明获取到更全方位的汽车视频图像数据,提高了用户的体验度,增加了系统的稳定性,并保障了系统数据的安全性,使得全景泊车影像系统更智能化,便于大面积推广应用。
[0021]
尽管本发明中未罗列更多的具体实施方式,但是对于本领域内普通技术人员而言均可理解,任何对本发明各个技术特征进行简单的替换以完成实现相同技术效果的行为,均应视为不超脱本发明的创新精神的。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 图像融合

 热门咨询
热门咨询




tips