
 商标分类
商标分类  商标转让
商标转让 
座椅靠背用旋转装置以及交通工具用座椅的制作方法
 2021-02-03 13:02:50|
2021-02-03 13:02:50| 271|
271| 起点商标网
起点商标网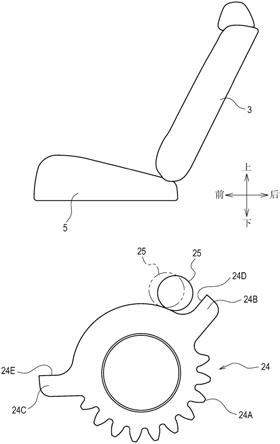
[0001]
本实用新型涉及座椅靠背用旋转装置以及交通工具用座椅,其中,该座椅靠背用旋转装置应用于安装在交通工具中的交通工具用座椅。
背景技术:
[0002]
例如,在日本特开第2016-215995号公报(专利文献1)所记载的交通工具用座椅中,在比座椅靠背的旋转中心靠上方侧处设置有锁定机构。该锁定机构是能够对使该座椅靠背卡止固定于交通工具的状态与该卡止固定已被解除的状态进行切换的机构。
技术实现要素:
[0003]
在专利文献1所记载的交通工具用座椅中采用了通过手动操作使座椅靠背旋转位移的构成。
[0004]
在本实用新型中,优选提供一种座椅靠背用旋转装置的示例,该座椅靠背用旋转装置适用于通过电动机使座椅靠背旋转位移的构成。
[0005]
本实用新型的一个方面为一种座椅靠背用旋转装置,该座椅靠背用旋转装置用于交通工具用座椅,交通工具用座椅具有锁定装置,锁定装置能够执行锁定状态和解除状态,锁定状态用于将座椅靠背保持在第1直立位置或者从该第1直立位置向座椅后方侧偏移的第2直立位置,解除状态是该锁定状态已被解除的状态,该座椅靠背用旋转装置具有电动机、作用机构、旋转体、以及被抵接部,电动机产生用于使座椅靠背旋转位移的旋转力,作用机构使旋转力作用在座椅靠背上,旋转体设置在作用机构上,并构成为接收旋转力而进行旋转,并且,旋转体具有在径向上突出的第1突起部以及第2突起部,被抵接部设置在作用机构上,并构成为与座椅靠背一体地旋转位移,且能够接触第1突起部和第2突起部中的任一个突起部,当被抵接部与该突起部相接触时,旋转力输入被抵接部,当座椅靠背处于第1直立位置时,且在旋转体位于使得第1突起部与被抵接部之间以及使得第2突起部与被抵接部之间均产生有间隙的位置的待机状态下,从第1突起部到被抵接部的间隙尺寸小于从第2突起部到被抵接部的间隙尺寸。
[0006]
由此,使得座椅靠背在第1突起部和第2突起部中的任一方的突起部与被抵接部相接触时接收旋转力而开始进行旋转。
[0007]
此外,座椅靠背用旋转装置可以具有如下的结构。
[0008]
在待机状态下的从第1突起部到被抵接部的间隙尺寸是使得座椅靠背能够在该待机状态下位移至第2直立位置的尺寸。
[0009]
第1突起部具有用于与被抵接部抵接的第1抵接面,并且第2突起部具有用于与被抵接部抵接的第2抵接面,在待机状态下,从第1 抵接面到被抵接部的间隙尺寸小于从第2抵接面到被抵接部的间隙尺寸。
[0010]
旋转体具有第1区域以及第2区域,第1区域是第1突起部与第 2突起部之间的区域,并且是被抵接部所处的区域,第2区域是第1突起部与第2突起部之间的区域,并且是位
于与第1区域相反的一侧的区域,在第2区域中形成有用于接收电动机的旋转力的齿轮部。
[0011]
本实用新型的另一个方面为一种交通工具用座椅,该交通工具用座椅具有座椅靠背、锁定装置、以及座椅靠背用旋转装置,其中,锁定装置能够执行锁定状态和解除状态,锁定状态用于将该座椅靠背保持在第1直立位置或者从该第1直立位置向座椅后方侧偏移的第2直立位置,解除状态是该锁定状态已被解除的状态,座椅靠背用旋转装置具有电动机、作用机构、旋转体、以及被抵接部,电动机产生用于使座椅靠背旋转位移的旋转力,作用机构使旋转力作用在座椅靠背上,旋转体设置在作用机构上,并且构成为接收旋转力而进行旋转,并且,旋转体具有在径向上突出的第1突起部和第2突起部,被抵接部设置在作用机构上,并构成为与座椅靠背一体地旋转位移,且能够接触第1 突起部和第2突起部中的任一个突起部,当被抵接部与该突起部相接触时,旋转力输入被抵接部,当座椅靠背处于第1直立位置时,且在旋转体位于使得第1突起部与被抵接部之间以及使得第2突起部与被抵接部之间均产生有间隙的位置的待机状态下,从第1突起部到被抵接部的间隙尺寸小于从第2突起部到被抵接部的间隙尺寸。
[0012]
此外,交通工具用座椅可以具有如下的结构。
[0013]
在待机状态下的从第1突起部到被抵接部的间隙尺寸是使得座椅靠背能够在该待机状态下位移至第2直立位置的尺寸。
[0014]
被抵接部直接或间接地固定在座椅靠背上。
[0015]
第1突起部具有用于与被抵接部抵接的第1抵接面,并且第2突起部具有用于与被抵接部抵接的第2抵接面,在待机状态下,从第1 抵接面到被抵接部的间隙尺寸小于从第2抵接面到被抵接部的间隙尺寸。
[0016]
旋转体具有第1区域以及第2区域,第1区域是第1突起部与第 2突起部之间的区域,并且是被抵接部所处的区域,第2区域是第1突起部与第2突起部之间的区域,并且是位于与第1区域相反的一侧的区域,在第2区域中形成有用于接收电动机的旋转力的齿轮部。
附图说明
[0017]
图1是示出第1实施方式的交通工具用座椅的图。
[0018]
图2是示出第1实施方式的交通工具用座椅的图。
[0019]
图3是示出第1实施方式的交通工具用座椅的图。
[0020]
图4是示出第1实施方式的交通工具用座椅的图。
[0021]
图5是示出第1实施方式的锁定装置的图。
[0022]
图6是示出第1实施方式的锁定装置的图。
[0023]
图7是示出第1实施方式的锁定装置的图。
[0024]
图8是示出第1实施方式的锁定装置的图。
[0025]
图9是示出第1实施方式的锁定装置的图。
[0026]
图10是示出第1实施方式的锁定装置的图。
[0027]
图11是示出第1实施方式的锁定装置的图。
[0028]
图12是示出第1实施方式的座椅靠背用旋转装置的图。
[0029]
图13是第1实施方式的座椅靠背用旋转装置的分解图。
[0030]
图14是第1实施方式的座椅靠背用旋转装置的控制系统框图。
[0031]
图15是第1实施方式的座椅靠背用旋转装置的动作说明图。
[0032]
图16是第1实施方式的座椅靠背用旋转装置的动作说明图。
[0033]
图17是第1实施方式的座椅靠背用旋转装置的动作说明图。
[0034]
图18是第1实施方式的座椅靠背用旋转装置的动作说明图。
[0035]
图19是第1实施方式的座椅靠背用旋转装置的动作说明图。
[0036]
图20是第1实施方式的座椅靠背用旋转装置的动作说明图。
[0037]
图21是第2实施方式的座椅靠背用旋转装置的控制系统框图。
具体实施方式
[0038]
以下参照附图说明本实用新型的实施方式。
[0039]
以下所说明的“实施方式”示出属于本实用新型的技术范围内的实施方式的一例。即,权利要求中记载的技术方案等不限于下述实施方式示出的具体结构或构造等。
[0040]
至少标注符号并加以说明的部件或部位除事先声明为“1个”等的情形外,其至少设置有1个。即,在未事先声明为“1个”等的情形下,该部件可设置有2个以上。
[0041]
在本实施方式中,将对安装在车辆等交通工具中的座椅(以下称为交通工具用座椅。)的示例进行说明。标注在各图中表示方向的箭头等是为了便于理解各图的相互关系而标注的符号。
[0042]
因此,本实用新型中公开的发明不限于标注在各图中的方向。各图所示的方向是将本实施方式的交通工具用座椅组装到车辆的状态下的方向。
[0043]
(第1实施方式)
[0044]
1.交通工具用座椅等的概要
[0045]
如图1所示,交通工具用座椅1至少具有座椅靠背3、锁定装置 10以及座椅靠背用旋转装置20。座椅靠背3是用于支撑就座者的背部的部位。
[0046]
座椅靠背3是作为车辆的后部座椅而使用的交通工具用座椅的座椅靠背。该座椅靠背3能够在座椅前后方向(在本实施方式中为车辆前后方向)上进行旋转。
[0047]
靠背框架3a是构成座椅靠背3的骨架的由金属制成的部件。靠背框架3a经由座椅靠背用旋转装置20以及托架3b以可进行旋转的方式连接于车身。
[0048]
锁定装置10是能够执行锁定状态和解除状态的装置,锁定状态用于将座椅靠背3保持在第1直立位置(参照图2)或者第2直立位置(参照图3),解除状态是该锁定状态已被解除的状态。第2直立位置是比第1直立位置向座椅后方侧偏移的位置。
[0049]
当锁定装置10处于解除状态时,如图4所示,座椅靠背3是能够倒伏至接触或接近座垫5的位置(以下称为倒伏位置。)。座垫5是用于支撑就座者的臀部的部位。
[0050]
2.锁定装置的结构
[0051]
<锁定装置的概要>
[0052]
如图1所示,锁定装置10固定在靠背框架3a的上部右端(门内板(未图示出)侧)。上下左右方向是图1中所图示的方向。该锁定装置10通过与图5所示的撞销10a卡合,而将靠背框架3a保持在第 1直立位置(参照图6)或者第2直立位置(参照图7)。
[0053]
撞销10a是固定在门内板等车身部件上的被卡合部件的示例。该撞销10a至少具有从门内板侧向靠背框架3a侧突出的第1卡合杆10b 以及第2卡合杆10c。
[0054]
第1卡合杆10b和第2卡合杆10c经由间隙部10d而在座椅的前后方向上分开。第1卡合杆10b相对于第2卡合杆10c位于座椅前方侧。在本实施方式中,第1卡合杆10b和第2卡合杆10c是通过弯曲一根金属杆而形成的一体成形品。
[0055]
<锁定装置的细节>
[0056]
如图8所示,锁定装置10至少具有钩11、待机板12、杆13以及操作部14(参照图1)。
[0057]
如图9以及图11所示,钩11是以钩挂的方式与撞销10a(第1 卡合杆10b或者第2卡合杆10c)卡合的卡合部件。因此,在钩11上设置有可供第1卡合杆10b或者第2卡合杆10c嵌入的凹部11a。
[0058]
该钩11能够在能够与撞销10a卡合的卡合位置(参照图9以及图 11)和能够解除该卡合的解除位置(参照图8以及图10)之间位移。即,当钩11处于卡合位置时,锁定装置10成为锁定状态。当钩11处于解除位置时,锁定装置10成为解除状态。
[0059]
具体地,当钩11与第1卡合杆10b已卡合时(参照图9),座椅靠背3被保持在第1直立位置。当钩11与第2卡合杆10c已卡合时(参照图11),座椅靠背3被保持在第2直立位置。
[0060]
钩11始终承受着来自钩弹簧(未图示出。)的弹力。该弹力是用于使钩11向卡合位置位移的力。操作部14是欲使钩11向解除位置位移时由使用者进行操作的部位。
[0061]
杆13将输入到操作部14的操作力传递到钩11。即,当对操作部 14进行操作时,钩11从卡合位置向解除位置移动。当操作力消失时,钩11会通过钩弹簧的弹力返回至卡合位置。
[0062]
还通过由控制部26(参照图14)控制的致动器(未图示出。)使杆13工作。即,钩11根据控制部26的控制命令而在卡合位置和解除位置之间位移。
[0063]
待机板12能够在用于将钩11保持在解除位置的第1待机位置(参照图8)与偏离该第1待机位置的位置(参照图9)之间位移,并且待机板12还能够在用于将钩11保持在解除位置的第2待机位置(参照图10)与偏离该第2待机位置的位置(参照图11)之间位移。
[0064]
如图8所示,第1待机位置是用于将钩11保持在解除状态的位置,在该解除状态下,该钩11未与第1卡合杆10b以及第2卡合杆10c中的任一个卡合。
[0065]
如图10所示,第2待机位置用于将钩11保持在如下位置,即,使得该钩11与第1卡合杆10b之间的卡合已被解除且使得钩11和第2 卡合杆10c之间能够卡合的位置。
[0066]
3.座椅靠背用旋转装置
[0067]
<座椅靠背用旋转装置的概要>
[0068]
座椅靠背用旋转装置20是用于使座椅靠背3在座椅的前后方向上旋转位移的装置。如图12所示,该座椅靠背用旋转装置20至少具有电动机21、作用机构23以及控制部26(参照图14)。
[0069]
电动机21产生用于使座椅靠背3旋转位移的旋转力,并且电动机 21能够正向旋转或反向旋转。如图13所示,电动机21与减速机构21a 一体化。
[0070]
减速机构21a是至少具有蜗杆和蜗轮的齿轮式减速机构。电动机 21以及减速机构21a固定在电动机托架21b上。电动机托架21b经由安装托架21c固定在车身部件上。
[0071]
作用机构23是能够将电动机21的旋转力作用在座椅靠背3上的机构。具体地,该作用机构23被构造成,当用于使座椅靠背3向座椅前方侧旋转的旋转力作用在该座椅靠背3上之后,该座椅靠背3能够通过作用在该座椅靠背3上的重力而自行旋转。
[0072]
<作用机构的细节构成>
[0073]
如图13所示,作用机构23至少具有扇形齿轮24以及按压销25。扇形齿轮24是接收所述旋转力而进行旋转的旋转体的示例。
[0074]
扇形齿轮24至少具有齿轮部24a、第1突起部24b以及第2突起部24c。齿轮部24a与减速机构21a的输出齿轮21d(参照图12)进行啮合。由此,当电动机21运转时,扇形齿轮24会进行旋转。在扇形齿轮24中,按压销25所处的、位于第1突起部24b与第2突起部 24c之间的区域是第1区域24f,位于与第1区域相反的一侧的、第1 突起部24b与第2突起部24c之间的区域是第2区域24s。齿轮部24a 形成在第2区域24s。
[0075]
第1突起部24b以及第2突起部24c是在径向上突出的部位,并且是构成能够与按压销25接触的第1抵接面24d以及第2抵接面24e 的部位。本实施方式的扇形齿轮24是一体成形出第1突起部24b以及第2突起部24c的一体制品。
[0076]
按压销25与座椅靠背3一体地旋转位移,并且按压销25是能够与第1突起部24b以及第2突起部24c中的任一个突起部也就是与第 1抵接面24d以及第2抵接面24e中的任一个抵接面接触的被抵接部的示例。
[0077]
如图12所示,按压销25固定在销托架25a上。销托架25a固定在靠背框架3a上。因此,按压销25与座椅靠背3一体地旋转位移。
[0078]
并且,在第1突起部24b和按压销25相接触的状态下,使座椅靠背3向座椅前方侧旋转的旋转力处于能够输入到按压销25的状态。在第2突起部24c和按压销25相接触的状态下,使座椅靠背3向座椅后方侧旋转的旋转力处于能够输入到按压销25的状态。
[0079]
当座椅靠背3在电动机21的作用下向座椅前方侧旋转时,该电动机21会正向旋转。当座椅靠背3在电动机21的作用下向座椅后方侧旋转时,该电动机21会反向旋转。并且,当电动机21正向旋转时,扇形齿轮24也正向旋转。当电动机21反向旋转时,扇形齿轮24也反向旋转。
[0080]
<控制部>
[0081]
如图14所示,由控制部26控制电动机21的动作。控制部26由具有cpu、rom、以及ram等的微型计算机构成。
[0082]
控制部26按照预先存储在诸如rom的非易失性存储部中的程序来控制电动机21的动作。第1传感器26a的输出信号被输入到该控制部26中。
[0083]
第1传感器26a输出表示座椅靠背3是否已经向座椅前方侧旋转至预先规定的第1位置的信号。“预先规定的第1位置”是设定在倒伏位置(参照图4)与第1直立位置之间的位置。
[0084]
具体地,第1位置是座椅靠背3通过作用在该座椅靠背3上的重力而自动开始向座椅前方侧旋转的位置。即,当座椅靠背3到达第1 位置时,座椅靠背3因自重而开始倒伏。
[0085]
并且,第1传感器26a向控制部26输出表示座椅靠背3到达了第1位置的信号。第1传感器26a以及控制部26利用流向电动机21的通电电流值超过阈值这一情形来检测座椅靠背3是否到达第1位置。
[0086]
在本实施方式中,设置有止动器(未图示出。),当电动机21正向旋转而使座椅靠背3到达了第1位置时,该止动器机械式地使扇形齿轮24停止旋转,即,机械式地使电动机21停止旋转。
[0087]
当在通电状态下电动机21停止旋转,则通电电流值会增加,因此,第1传感器26a以及控制部26通过检测出该通电电流值的增加而检测出座椅靠背3到达了第1位置。
[0088]
第2传感器26b的输出信号也被输入到控制部26。第2传感器26b 检测座椅靠背3是否处于第1直立位置。第2传感器26b可以由限位开关或接近开关构成。当座椅靠背3处于第1直立位置时,该第2传感器26b输出接通信号。
[0089]
<第1突起部与按压销之间的位置关系以及第2突起部与按压销之间的位置关系>
[0090]
如图15~图20所示,第2突起部24c设置在相对于第1突起24b 朝正向旋转的方向偏移的位置。具体地,沿着扇形齿轮24的旋转方向所测量到的从第1抵接面24d到第2抵接面24e长度大于按压销25 的直径。
[0091]
因此,在第1突起部24b和按压销25相接触的状态下(参照图 17),第2突起部24c与按压销25处于不接触的状态。在第2突起部 24c和按压销25相接触的状态下(参照图20),第1突起部24b与按压销25处于不接触的状态。
[0092]
并且,无论座椅靠背3的位置如何,按压销25始终处于第1突起部24b与第2突起部24c之间(参照图15~图20)。即,按压销25 不会与齿轮部24a接触。
[0093]
例如,当座椅靠背3处于第1直立位置时,如图15所示,控制部 26使扇形齿轮24位于使得第1突起部24b与按压销25之间以及使得第2突起部24c与按压销25之间均产生有间隙的位置。在下文中,当扇形齿轮24位于该位置时,则称扇形齿轮24处于待机状态。
[0094]
此外,在扇形齿轮24处于待机状态的情况下,从第1突起部24b 到按压销25的间隙尺寸l1小于从第2突起部24c到按压销25的间隙尺寸l2。间隙尺寸l1、l2是沿着绕扇形齿轮24的中心轴旋转的旋转方向的间隙的尺寸。
[0095]
具体地,在待机状态下的间隙尺寸l1是使得座椅靠背3能够在扇形齿轮24处于待机状态的状态下位移至第2直立位置的尺寸。图16 的上部示出了当座椅靠背3处于第2直立位置时的情形。
[0096]
在图16中由实线表示的按压销25是当座椅靠背3处于第2直立位置时的按压销25。在图16中由双点划线表示的按压销25是当座椅靠背3处于第1直立位置时的按压销25。
[0097]
<扇形齿轮(电动机)的倒伏控制>
[0098]
在座椅靠背3处于第1直立位置或者第2直立位置的情况下,当欲使该座椅靠背3向倒伏位置位移时,控制部26执行以下的倒伏控制模式。当使用者操作了倒伏动作开关(未图示出。),则会执行倒伏控制模式。
[0099]
首先,控制部26将锁定装置10的钩11设置到解除位置。接下来,控制部26通过使电动机21正向旋转而使第1突起部24b和按压销25 接触,从而使正向旋转的旋转力作用在座椅靠背3上。
[0100]
接下来,当座椅靠背3到达了第1位置时(参照图17),控制部 26使电动机21反向旋转以使第1突起部24b返回至预先规定的第2 位置(参照图19)。本实施方式的第2位置是第1突起部24b在扇形齿轮24处于待机状态的情况下所处的位置。
[0101]
当座椅靠背3到达第1位置时,该座椅靠背3以借助因其自重所产生的重力而倒伏的方式向座椅前方侧旋转(参照图18)。因此,当座椅靠背3处于倒伏状态且第1突起部24b处于第2位置时,第2突起部24c位于以按压销25为基准而预先规定的范围内(参照图19)。
[0102]“第2突起部24c位于以按压销25为基准而预先规定的范围内”是指,例如,(a)第2
突起部24c与按压销25接触的位置,或者(b) 第2突起部24c与按压销25之间的间隔l3(参照图19)为预先规定的尺寸以下的位置。间隔l3是沿着绕扇形齿轮24的中心轴旋转的旋转方向的间隔。
[0103]
4.座椅靠背的动作
[0104]
在座椅靠背3处于第1直立位置(参照图15)或者第2直立位置 (参照图16)的状态下,如果控制部26开始倒伏控制模式,则电动机 21在锁定装置10的钩11成为解除状态之后开始正向旋转。
[0105]
如果电动机21正向旋转而使座椅靠背3到达了第1位置(参照图 17中的实线),则电动机21会反向旋转而使第1突起部24b返回至第 2位置,然后电动机21停止旋转。
[0106]
此时,由于座椅靠背3已经到达第1位置,因此,座椅靠背3会因自重而旋转位移至倒伏位置(参照图18以及图19)。在座椅靠背3 倒伏的状态(参照图19)下,如果电动机21反向旋转并且第2突起部 24c与按压销25接触,则座椅靠背3向座椅后方侧旋转以进行直立。
[0107]
接下来,如果座椅靠背3旋转至第1直立位置,则该座椅靠背3 被锁定装置10保持在第1直立位置。如果座椅靠背3被保持在第1直立位置,则控制部26使电动机21反向旋转以使扇形齿轮24返回至待机状态(参照图15)。
[0108]
5.本实施方式的交通工具用座椅(特别是,座椅靠背用旋转装置) 的特征
[0109]
座椅靠背用旋转装置20的作用机构23被构造成,在电动机21的旋转力作用在座椅靠背3上之后,通过作用在该座椅靠背3上的重力使该座椅靠背3能够自行旋转。
[0110]
由此,座椅靠背3处于在经由作用机构23接收了旋转力而开始旋转之后,该座椅靠背3能够通过作用在座椅靠背3上的重力而自行旋转的状态。与通过弹簧使座椅靠背3旋转的构成相比,在自行旋转时座椅靠背3的旋转速度变小。
[0111]
因此,座椅靠背用旋转装置20被构造成,在抑制座椅靠背3以过快的速度倒伏的同时,还能够废除用于使座椅靠背3倒伏或者旋转位移的弹簧。
[0112]
在扇形齿轮24的旋转方向上,在该扇形齿轮24中的彼此分离的位置处分别设置有第1突起部24b以及第2突起部24c。在第1突起部24b和按压销25相接触的状态下,第2突起部24c与按压销25处于不接触的状态,并且,无论座椅靠背3的位置如何,按压销25始终处于第1突起部24b与第2突起部24c之间。
[0113]
由此,在座椅靠背用旋转装置20中,当第1突起部24b以及第2 突起部24c中的任一个突起部与按压销25相接触时,座椅靠背3均会接收旋转力而开始旋转。
[0114]
第2突起部24c处于相对于第1突起部24b在扇形齿轮24的旋转方向上偏移的位置,并且,无论座椅靠背3的位置如何,按压销25 始终处于第1突起部24b与第2突起部24c之间。
[0115]
因此,座椅靠背3能够在第1突起部24b与第2突起部24c之间的区间中自由地旋转位移。因此,交通工具用座椅1的使用者能够通过手动操作使座椅靠背3旋转位移。即,根据本实施方式的交通工具用座椅1能够在抑制座椅靠背3的旋转速度变得过快的同时通过手动操作使座椅靠背3旋转位移。
[0116]
控制部26能够执行如下的倒伏控制模式,即,通过使电动机21 正向旋转而使第1突起部24b和按压销25接触从而使旋转力作用在座椅靠背3上,然后,当该座椅靠背3到达了第1位置时,使电动机21 反向旋转以使第1突起部24b返回至第2位置。由此,使用者能够通过手动操作使座椅靠背3在第1位置与第2位置之间旋转位移。
[0117]
由于第2位置是将座椅靠背3置于能够就座的状态的位置(第1 直立位置),所以使用者能够通过手动操作将已倒伏的座椅靠背3置于能够就座的状态。
[0118]
当座椅靠背3处于倒伏状态,并且第1突起部24b处于第2位置时,第2突起部24c处在以按压销25为基准的范围内。由此,座椅靠背3连动于电动机21的开始旋转而迅速地开始向能够就座的状态进行旋转位移。
[0119]
在扇形齿轮24处于待机状态的情况下,从第1突起部24b到按压销25的间隙尺寸l1小于从第2突起部24c到按压销25的间隙尺寸 l2。
[0120]
由此,在座椅靠背用旋转装置20中,当第1突起部24b以及第2 突起部24c中的任一个突起部与按压销25相接触时,座椅靠背3均会接收旋转力而开始旋转。
[0121]
在待机状态下的间隙尺寸l1是能够使座椅靠背3在扇形齿轮24 处于待机状态的状态下位移至第2直立位置的尺寸。因此,就座者能够在扇形齿轮24处于待机状态时使座椅靠背3位移至第2直立位置。
[0122]
(第2实施方式)
[0123]
上述实施方式的扇形齿轮24具有无法越过第1位置而向座椅前方侧旋转的构造。相对于此,本实施方式的扇形齿轮24能够旋转直至将座椅靠背3置于倒伏位置。
[0124]
以下的说明是对与上述实施方式的不同之处的说明。此外,对与上述实施方式相同的构成元素等标注与上述实施方式相同的符号。因此,在本实施方式中,省略重复的说明。
[0125]
与第2传感器26b相同,本第2实施方式的第1传感器26a也由限位开关或者接近开关构成。如图21所示,第3传感器26c的输出信号被输入到控制部26。
[0126]
当座椅靠背3到达了倒伏位置时,第3传感器26c向控制部26 输出表示该座椅靠背3到达了该倒伏位置的信号(以下称为倒伏信号。)。与第1实施方式的第1传感器26a相同,该第3传感器26c 也利用流向电动机21的通电电流值的增加来检测倒伏位置。
[0127]
并且,在执行倒伏控制模式时,控制部26使电动机21正向旋转直至接收到倒伏信号为止。即,如果座椅靠背3到达第1位置,则座椅靠背3会因自重而开始向倒伏位置旋转。
[0128]
如果控制部26在座椅靠背3到达第1位置之后的预先规定时间内不能接收到倒伏信号,则控制部26使电动机21正向旋转直至接收到倒伏信号为止。如果控制部26接收到倒伏信号,则控制部26使电动机21反向旋转以使扇形齿轮24返回至待机状态(参照图15)。
[0129]
(其他实施方式)
[0130]
上述实施方式的第2位置是第1突起部24b在扇形齿轮24处于待机状态时的位置。不过,本实用新型不限于此。例如,第2位置可以是第1突起部24b在扇形齿轮24处于待机状态以外的状态时的位置。
[0131]
上述实施方式的“预先规定的第1位置”是设定在倒伏位置与第1 直立位置之间的位置。不过,本实用新型不限于此。例如,“预先规定的第1位置”可以是不在倒伏位置与第1直立位置之间的位置。
[0132]
当座椅靠背3处于倒伏位置且第1突起部24b处于上述第2位置时,上述实施方式的第2突起部24c处于以按压销25为基准的预先规定的范围内。不过,本实用新型不限于此。
[0133]
在上述实施方式中,控制部26通过使电动机21正向旋转而使第 1突起部24b和按压销25接触从而使电动机21的旋转力作用在座椅靠背3上,然后,当该座椅靠背3到达了第1
位置时,控制部26使电动机21反向旋转以使第1突起部24b返回至第2位置。不过,本实用新型不限于此。
[0134]
在上述实施方式中,当座椅靠背3处于第1直立位置时,扇形齿轮24位于使得第1突起部24b与按压销25之间以及使得第2突起部 24c与按压销25之间均产生有间隙的位置。不过,本实用新型不限于此。
[0135]
在上述实施方式中,在待机状态下,间隙尺寸l1被构造成小于间隙尺寸l2。不过,本实用新型不限于此。
[0136]
例如,在待机状态下,间隙尺寸l1可以被构造成与间隙尺寸l2 相同,或者在待机状态下,间隙尺寸l1可以被构造成大于间隙尺寸 l2。
[0137]
在上述实施方式中,在待机状态下的间隙尺寸l1是使得座椅靠背 3能够在扇形齿轮24处于待机状态的状态下位移至第2直立位置的尺寸。不过,本实用新型不限于此。
[0138]
在上述实施方式中,以汽车车辆中的交通工具用座椅为例进行了说明。不过,本实用新型不限于此,也可以在用于铁道车辆,船舶以及航空器等交通工具的座椅中应用本实用新型,并且,也可以在用于剧院或家庭等的固定型座椅中应用本实用新型。
[0139]
此外,本实用新型只要符合上述实施方式的发明主旨即可,并不限于上述实施方式。因此,也可以是由上述多个实施方式中的至少2 个实施方式组合而成的构成,或者,既可以是废除上述实施方式中图示的构成元素中的中的任一个元素的构成,还可以是废除上述实施方式中标注符号加以说明的构成元素中的任一个元素的构成。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 电动机

 热门咨询
热门咨询




tips