
 商标分类
商标分类  商标转让
商标转让 
一种可变结构多模式移动机器人的制作方法
 2021-02-03 13:02:47|
2021-02-03 13:02:47| 314|
314| 起点商标网
起点商标网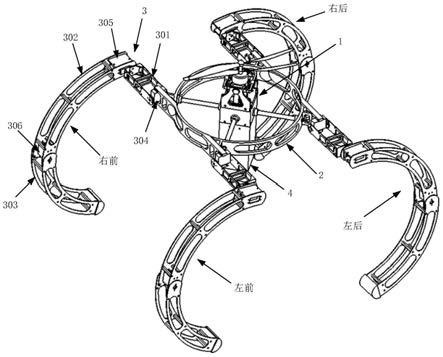
[0001]
本发明属于机械设计领域,涉及一种可变结构多模式移动机器人。
背景技术:
[0002]
传统的机器人通常只有单一的运动模式,如轮式或履带式前进、足式行走、空中飞行、水下航行等。但机器人应用的环境往往是复杂多变的,单一运动模式的机器人往往难以取得好的效果。例如,勘测机器人通常需要越过障碍,穿过河流,轮式和履带机器人通常难以胜任。足式机器人可以在崎岖地形下行走,但其速度较慢,可靠性不足,也无法翻越陡坡和水流。飞行机器人可以在空中进行探测,不受地形影响,但其消耗能量大,作业时间短。因此,开发一种能够进行多模式移动的机器人具有重要的意义。
技术实现要素:
[0003]
本发明的目的是为了解决上述问题,提出一种可变结构多模式移动机器人,主要满足机器人在复杂地形下稳定可靠运动的要求,适合在地形环境多变的条件下移动作业。
[0004]
本发明的一种可变结构多模式移动机器人,其特征在于:包括飞行部件、连接部件、腿部部件与控制部件。
[0005]
所述飞行部件为由共轴双桨电机驱动的反向旋转的两个螺旋桨。共轴双桨电机上由内至外套有内旋转平台与外旋转平台;内旋转平台与共轴双桨电机固定;外旋转平台x轴方向两侧与内旋转平台间铰接,同时y轴方向两侧与固定基座铰接;由此使内旋转平台绕x轴与y轴旋转运动。
[0006]
所述连接部件为环形,套于飞行部件外侧,周向上与固定基座连接。连接部件用于连接四套腿部部件。四套腿部部件绕机身z轴均匀对称布置,共有12个自由度,其中每个腿部部件具有3个自由度,关节结构布置和哺乳动物关节布置类似,由舵机实现各关节间的转动控制,且在腿部部件处于收拢状态时,通过对四套腿部部件的控制,使在连接部件两侧位置形成拼接形成圆环形结构。
[0007]
所述控制部件安装于飞行部件下方,包括保护盒以及保护盒内的电池、控制板与驱动器。
[0008]
本发明可变结构多模式移动机器人,具有四种运动模式,飞行模式,地面行走模式、地面滚动模式和飞爬结合模式。
[0009]
飞行模式下,机器人依靠飞行部件产生升力,控制飞行方向和飞行高度。
[0010]
地面行走模式下,机器人通过腿部部件进行静步态或动步态行走运动,在行走控制时,机器人四条腿按照一定规律周期处于支撑和摆动状态,根据步态控制算法计算腿部足端的位置坐标,再解算出各个关节控制舵机末端连杆、中部连杆与前端连杆的旋转角度即可。
[0011]
滚动模式下,腿部部件处于收拢状态,连接部件两侧的圆环结构与地面接触,通过控制腿部部件向外摆动,产生对机体的前向推力。
[0012]
在飞爬结合模式下,机器人受到飞行部件和腿部部件的同时控制,飞行部件产生向上的拉力。
[0013]
本发明的优点在于:
[0014]
(1)本发明可变结构多模式移动机器人,具有可变结构的特性,并具有爬行、飞行和滚动等多种形式运动的功能,便于在复杂地形环境下进行侦察探测等作业。
[0015]
(2)本发明可变结构多模式移动机器人,在机械腿折叠后对螺旋桨有保护作用,适合在狭窄空间内飞行。
[0016]
(3)本发明可变结构多模式移动机器人,可以通过机械腿末端位置的调整降落在崎岖地面上。
附图说明
[0017]
图1为本发明可变结构多模式移动机器人腿部部件展开状态结构示意图。
[0018]
图2为本发明可变结构多模式移动机器人飞行部件结构示意图。
[0019]
图3为本发明可变结构多模式移动机器人连接部件安装方式示意图。
[0020]
图4为本发明可变结构多模式移动机器人腿部部件收拢状态示意图。
[0021]
图5是本发明可变结构多模式移动机器人滚动90度前后对比示意图。
[0022]
图中:
[0023]
1-飞行部件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2-连接部件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3-腿部部件
[0024]
4-控制部件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5-控制部件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101-共轴双桨电机
[0025]
102-螺旋桨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
103-内旋转平台
ꢀꢀꢀꢀꢀꢀ
104-外旋转平台
[0026]
105-舵机连杆组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
106-固定基座
ꢀꢀꢀꢀꢀꢀꢀꢀ
105a-驱动舵机
[0027]
105b-摇臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
105c-拉杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
301-末端连杆
[0028]
302-中部连杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
303-前端连杆
ꢀꢀꢀꢀꢀꢀꢀꢀ
304-末端驱动舵机
[0029]
305-中部驱动舵机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
306-前部驱动舵机
具体实施方式
[0030]
下面将结合附图和实施例对本发明作进一步的详细说明。
[0031]
本发明是一种可变结构多模式移动机器人,包括飞行部件1、连接部件2、腿部部件3与控制部件4。
[0032]
所述飞行部件1包括共轴双桨电机101、螺旋桨102、内旋转平台103、外旋转平台104、舵机连杆组件105与固定基座106,如图2所示。
[0033]
其中,共轴双桨电机101具有两个无刷电机,两个无刷电机上下同轴设置。其中上方无刷电机输出轴为空心轴,下方无刷电机输出轴为实心轴,下方无刷电机输出轴穿过上方无刷电机输出轴。螺旋桨102为两个,上下同轴设置,分别固定于两个无刷电机的输出轴上,由此通过两个无刷电机可驱动两个螺旋桨102绕两个无刷电机轴线沿顺时针和逆时针方向转动,产生对机器人的拉力。同时增加或降低两个螺旋桨102的转速,可增大或减小对机器人的拉力,实现机器人飞行升降控制。因两个螺旋桨102转向方向相反,旋转过程中对机器人产生的反扭矩作用方向相反;当两个螺旋桨102转速相同时,产生的反扭矩作用相互抵消,当两个螺旋桨转速不同时,反扭矩作用不能抵消,机器人在反扭矩作用下绕竖直方向
z轴旋转,实现机器人飞行的z轴旋转控制。
[0034]
内旋转平台103与外旋转平台104均采用树脂材料,通过3d打印加工完成。其中,内旋转平台103为矩形框架,固定套接于共轴双桨电机101机体上方;外旋转平台同为矩形框架,套于内旋转平台103外侧;外旋转平台相对侧面与内旋转平台同侧侧面间通过转轴相连,形成转动副,使内旋转平台103间具有绕x轴旋转的自由度。同时外旋转平台另外两个相对侧面与固定基座106两侧的连接面顶部通过转轴相连,形成转动副,使外旋转平台104间具有绕y轴的旋转的自由度,最终使得内旋转平台103具有绕x轴和y轴旋转的自由度。当内旋转平台103与外旋转平台104旋转时可带动共轴双桨电机绕x轴和y轴转动,使得两个螺旋桨102拉力作用线方向改变,实现机器人绕x轴和y轴的姿态旋转控制。
[0035]
上述内旋转平台103绕x轴与y轴旋转运动,通过两套舵机连杆组件105实现。两套舵机连杆组件105均由驱动舵机105a、摇臂105b与拉杆105c构成。两套舵机连接组件105可分为x轴旋转驱动组件与y轴旋转驱动组件;其中,x轴旋转驱动组件中驱动舵机105a输出轴朝向x轴方向设置,摇臂105b末端固定于驱动舵机105a输出轴上;拉杆105c末端与摇臂105b前端铰接,拉杆105c前端铰接于内旋转平台103一侧端部处设计的凸耳上,且铰接轴沿x轴方向。由此,通过驱动舵机105a带动摇臂105b摆动,实现拉杆105c对内旋转平台103一侧端部的上下推拉,进而实现内旋转平台103绕x轴的旋转运动。同理,y轴旋转驱动组件中,驱动舵机105a输出轴朝向y轴方向设置,摇臂105b末端固定于驱动舵机105a输出轴上;拉杆105c末端与摇臂105b前端铰接,拉杆105c前端铰接于内旋转平台103一侧端部,且铰接轴沿y轴方向;由此,通过驱动舵机105a带动摇臂105b摆动,实现拉杆105c对外旋转平台103一侧端部的上下推拉,实现外旋转平台104绕y轴的旋转运动,进而实现内旋转平台103绕y轴的旋转运动。
[0036]
上述x轴旋转驱动组件与y轴旋转驱动组件中的驱动舵机105a分别固定安装于外旋转平台104与固定基座106上。因此当y轴带动外旋转平台104转动时,x轴旋转驱动组件的驱动舵机105a也会随内旋转平台103一同转动,保证外旋转平台104旋转时,内旋转平台103转角不变,使两套旋转驱动组件中的驱动舵机105a互不干扰;当x轴舵机旋转时,可带动内旋转平台103相对外旋转平台104转动。
[0037]
所述连接部件2为环形镂空结构,材料为树脂,通过3d打印加工完成。连接部件2套于飞行部件1中固定基座106外侧,周向上通过碳纤维管5与固定基座106连接。碳纤维管5为四根,等角度间隔水平设置,末端连接部件4固定,前端与固定基座106连接。固定基座106采用正方体结构,四根碳纤维管5前端分别与固定基座106周向四个侧壁中心位置连接。同时,连接部件2两侧前后对称位置设计有连接头,用于连接四套腿部部件3。
[0038]
如图1所示,所述四套腿部部件3绕机身z轴均匀对称布置,每组腿部部件3包括末端连杆301、中部连杆302与前端连杆303,均由碳纤维板和尼龙柱连接组成,方便加工装配。其中,末端连杆301为直杆,中部连杆302和前端连杆303均为弧形杆,弧度相同,且末端连杆301、中部连杆302与前端连杆303均由两根平行杆构成,两平行杆间通过加强梁连接加固连杆结构。末端连杆301的末端安装有末端驱动舵机304,末端驱动舵机304输出轴垂直于末端连杆301设置,与末端连杆301中一侧杆固定,机体端与末段连杆301中另一侧杆通过轴承连接,进而由末端驱动舵机304驱动腿部部件3绕末端驱动舵机304轴线旋转。
[0039]
中部连杆302前端与前部连杆303末端两侧杆间通过轴承连接;中部连杆302的末
端与前端分别固定安装有中部驱动舵机305与前部驱动舵机306。其中,中部驱动舵机305输出轴穿过中部连杆302一侧杆开孔后,垂直固定于末端连杆301前端面中心位置,由此通过中部驱动舵机305驱动中部连杆302与前端连杆303共同绕中部驱动舵机305轴线旋转。前部驱动舵机306输出轴平行于中部驱动舵机305输出轴设置,端部穿过中部连杆302侧杆开孔后与前部连杆303侧杆间固定。由此通过前部驱动舵机306驱动中前端连杆303绕前部驱动舵机306轴线旋转。
[0040]
上述末端驱动舵机304与中部驱动舵机305用于实现腿部部件3的展开与收拢,当腿部部件3达到展开状态时,末端连杆301展开至于水平面平行,此时通过中部驱动电机305与前部驱动舵机306实现驱动腿部部件3的展开后的运动控制;且通过中部驱动舵机305的驱动可使前部连杆303与中部连杆302间展开至整体形成半圆弧形,达到收拢准备状态。
[0041]
上述结构的四套腿部部件3中,末端驱动舵机304分别安装于连接部件2两侧前后对称位置设计的连接头上。令四个连接头分别位于连接部件2的左后、左前、右后与右前位置,则与左后、左前连接头连接的腿部部件3处于收拢准备状态时,支撑腿内弧面相对。同样右后、右前连接头连接的腿部部件3处于收拢准备状态时,支撑腿内弧面相对。
[0042]
在四条腿部部件3进行收拢时,以同侧相对的腿部部件3为一组,则通过末端驱动电机304控制各组腿部部件3中的末端连杆301反向摆动,同时斜向相对的腿部部件3中的末端连杆301同向旋转,此时同时控制令两个连接头所连接的腿部部件3中末端连杆301反向摆动。由此使斜向相对的两条腿部部件3中的中部连杆302与前端连杆303位于连接部件2的上方,另两条腿部部件3中的中部连杆302与前端连杆303位于连接环的下方;进一步通过中部驱动舵机305控制连接环上下位置的两条腿部部件3中的中部连杆302与前端连杆303共同转动,使一条腿部部件中前端连杆303端部与另一条末端连杆301端部相接,在连接部件2上方与下方形成圆环结构。
[0043]
上述前端连杆303前端为半圆柱型足端结构,通过3d打印加工完成。足端圆弧面覆盖有橡胶,以增大和地面接触的摩擦力,同时减少触地时对机身的冲击。
[0044]
所述控制部件2包括保护盒201以及保护盒201内的电池、控制板与驱动器。其中,电池用于为驱动舵机105a、控制板和驱动器供电。驱动器用于驱动共轴双桨电机101。控制板用于接收外部控制信号,处理控制板内部集成的姿态传感器获取的机器人机身的姿态角度和角速度信息,并根据控制算法通过驱动器进行机器人运动控制。控制部件2置于飞行部件1下方,通过保护盒201顶部与前述飞行部件1中固定基座106底部间通过螺栓紧固。上述保护盒201采用树脂材料,通过3d打印加工完成。
[0045]
本发明的可变结构机器人具有四种运动模式,飞行模式,地面行走模式、地面滚动模式和飞爬结合模式;机器人在起飞和降落时,均处于图3所示的展开状态,机器人在正常飞行时,处于图2所示的收拢状态。
[0046]
飞行模式下,机器人依靠飞行部件1产生升力,控制飞行方向和飞行高度,包括两个螺旋桨102的转速、内旋转平台103、外旋转平台104绕x轴和y轴旋转的角度四个控制量;当两个螺旋桨102旋转时,产生对机器人的拉力;螺旋桨102转速增大则拉力增大,实现飞行高度控制;旋转平台向x轴正向倾转,则机器人向x轴正向飞行;内旋转平台103向y轴正向倾转,则机器人向y轴正向飞行;若以上控制量反向变化,则机器人反向运动。
[0047]
地面行走模式下,机器人可利用腿部部件5进行静步态或动步态行走运动,腿部部
件5共有12个自由度,其中每个机械腿3个自由度,关节结构布置和哺乳动物关节布置类似,便于使用足式行走控制算法。在行走控制时,机器人四条腿按照一定规律周期处于支撑和摆动状态,根据步态控制算法计算腿部足端的位置坐标,再解算出末端连杆301、中部连杆302与前端连杆303的旋转角度即可。
[0048]
滚动模式下,机器人处于图2所示收拢状态,机械腿折叠后形成包围机身的两层圆环,z轴和地面平行,机器人绕z轴滚动,当上下两层圆环的旋转关节和地面接触时,相应机械腿向外摆动,产生对机体的前向推力。滚动模式下只有中部驱动舵机305和前部驱动舵机306工作,滚动控制90度前后对比示意图如图5所示,图中圆弧表示连杆,圆点表示旋转轴线,箭头表示对应关节的旋转方向,其中旋转轴线a为末端连杆301与中部连杆302间的旋转轴线;b为中部连杆302与前端连杆303间的旋转轴线。
[0049]
在飞爬结合模式下,机器人受到飞行部件1和腿部部件5的同时控制,飞行部件1产生向上的拉力,在减轻腿部载荷的同时还具有稳定机身姿态的作用,当机器人在崎岖地形行走时,若因地形变化过大导致机器人即将翻倒,飞行部件1会立即产生足够的升力,使转入飞行模式。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips