
 商标分类
商标分类  商标转让
商标转让 
多层培养容器观察系统、托架装置及多层培养容器观察装置的制作方法
 2021-02-02 16:02:51|
2021-02-02 16:02:51| 292|
292| 起点商标网
起点商标网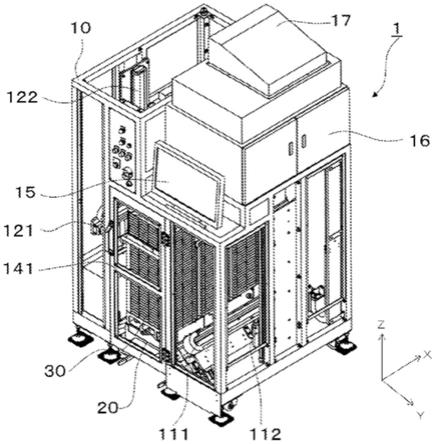
[0001]
本发明是关于用以观察内置多个托盘的多层培养容器中的被观察物的多层培养容器观察系统、托架装置及多层培养容器观察装置。
背景技术:
[0002]
已知有用以观察内置多个托盘的多层培养容器中的被观察物(培养物)的多层培养容器观察装置。在这样的多层培养容器观察装置中,已知有如下的培养容器观察装置:为了观察各托盘中的培养细胞的状态,在中间夹隔多层培养容器,使光学观察设备朝向斜上方且使照明设备朝向斜下方而相对向,并将光学观察设备、多层培养容器和照明设备配置于同一光轴上(例如参照专利文献1)。
[0003]
[现有技术文献]
[0004]
[专利文献]
[0005]
专利文献1:日本专利第4049263号公报
技术实现要素:
[0006]
发明所要解决的问题
[0007]
现有技术中,在利用培养容器观察装置来观察多层培养容器的被观察物的情况下,作业人员必须利用托架将多个多层培养容器搬运至培养容器观察装置的附近,并将装有培养液的多层培养容器自托架卸下,其后,将多层培养容器置于作为培养容器观察装置的观察位置的基座,来对多层培养容器中的被观察物进行观察。尤其,在多个多层培养容器中观察被观察物的情况下,必须进行将装有培养液的多层培养容器一次一个地加以装卸的作业,而存在有作业人员的劳动量会增大的问题。此外,由于作业人员以徒手作业的方式处理多层培养容器,因此也存在有因为对多层培养容器内的培养基施加不必要的冲击、或不必要地接触多层培养容器,而导致多层培养容器破损从而产生污染的情形。
[0008]
本发明提供作业人员可容易地观察多层培养容器中的被观察物的多层培养容器观察系统、托架装置及多层培养容器观察装置。
[0009]
用于解决问题的技术方案
[0010]
本发明的培养容器观察系统是一种多层培养容器观察系统,其包括:托架装置,其可搭载内置多个托盘的多层培养容器而进行移动;和观察装置,其可观察上述多层培养容器的各托盘的被观察物,其中,上述托架装置具有框体,该框体具有使上述多层培养容器的相对向的两个侧面的上端至下端露出的侧面露出部,上述观察装置具有:收容部,其将上述托架装置在搭载有上述多层培养容器的状态下直接加以收容;及摄像装置,其具有光学系统而输出由该光学系统所成像而得到的像;在上述收容部收容有搭载上述多层培养容器的上述托架装置的情况下,上述侧面露出部被配置于上述摄像装置的光轴上。在上述培养容器观察系统中,进一步具有保持并操控上述多层培养容器的操作装置,上述托架装置具有:托架,其具有车轮;及固定构件,其相对于上述托架装卸自如地被搭载于上述托架之上,将
上述多层培养容器固定于上述托架;上述操作装置将上述多层培养容器连同上述固定构件一起保持并加以操控。在上述培养容器观察系统中,进一步具有与上述摄像装置对向地被设置且朝向上述摄像装置照射光的照明装置,在上述收容部收容有搭载上述多层培养容器的上述托架的情况下,上述摄像装置、上述多层培养容器、及上述照明装置于中间夹隔上述多层培养容器而被配置于同一光轴上。在上述培养容器观察装置系统中,进一步具有将上述摄像装置及上述照明装置朝第1方向及第2方向驱动的驱动部,上述托架具有可将多个上述多层培养容器沿着上述第1方向并列地加以搭载的搭载空间。在上述多层培养容器观察系统中,上述摄像装置及上述照明装置以上述摄像装置及上述照明装置的光轴相对于上述多层培养容器的托盘的底面呈40~50
°
的范围的角度交叉的方式被配置。
[0011]
本发明的托架装置是被收纳于可观察多层培养容器的各托盘的被观察物的观察装置;其中,其具有将内置多个托盘的多层培养容器加以固定的框体,上述框体具有使上述多层培养容器的相对向的两个侧面的上端至下端露出的侧面露出部。上述托架装置可构成为具有多组上述框体。
[0012]
本发明的多层培养容器观察装置具有收容部和摄像装置,该收容部将上述托架装置在搭载有上述多层培养容器的状态下直接加以收容,该摄像装置具有光学系统,输出由该光学系统所成像而得到的像,其中,在上述收容部收容有搭载上述多层培养容器的上述托架装置的情况下,上述侧面露出部被配置于上述摄像装置的光轴上。
[0013]
发明效果
[0014]
根据本发明,可提供作业人员可容易地观察多层培养容器的被观察物的多层培养容器观察系统、托架装置及多层培养容器观察装置。
附图说明
[0015]
图1是用以说明本实施方式的多层培养容器的图。
[0016]
图2(a)及(b)是用以说明向多层培养容器中的各托盘的液体的分配方法的图。
[0017]
图3是表示第1实施方式的多层培养容器观察系统的立体图。
[0018]
图4是表示本实施方式的托架装置的立体图。
[0019]
图5是例示本实施方式的托架装置的观察状态的立体图。
[0020]
图6(a)是表示本实施方式的横框构件的图,图6(b)是表示安装横框构件前的托架装置的图,图6(c)是表示已安装横框构件的托架装置的图。
[0021]
图7是表示本实施方式的多层培养观察装置的方块图。
[0022]
图8是用以说明摄像装置、多层培养容器及照明装置的位置关系的图。
[0023]
图9是用以说明多层培养容器操作装置的立体图。
[0024]
图10是表示多层培养容器操作装置的方块图。
[0025]
图11是用以说明固定构件的被卡止部与多层培养容器操作装置的卡止构件的关系的图。
[0026]
图12是表示将多层培养容器暂时固定于多层培养容器操作装置的臂的状态的立体图。
[0027]
图13是表示以旋转轴x1为中心的旋转部的旋转动作的一例的图。
[0028]
图14是表示以旋转轴x2为中心的旋转部的旋转动作以及以旋转轴x1及x2为中心
的旋转部的旋转动作的一例的图。
[0029]
图15是表示使多层培养容器操作装置的振荡部突出的状态的立体图。
[0030]
图16是用以说明在振荡动作中臂与插通孔的关系的图。
[0031]
图17是用以说明第3实施方式的多层培养容器操作装置的方块图。
具体实施方式
[0032]
以下,对本实施方式的多层培养容器观察系统1进行说明。本实施方式的多层培养容器观察系统1是用以观察被利用于细胞培养等的多层培养容器30中的培养细胞的系统。因此,首先对本实施方式的多层培养容器30进行说明。图1是用以说明本实施方式的多层培养容器30的图,且为表示多层培养容器30的剖视图。为了大量地培养细胞,如图1所示,多层培养容器30成为积层有多个托盘31的构成。在利用多层培养容器30来培养细胞的情况下,例如,如图2(a)所示那样,以通气孔盖(vent cap、通气帽)32成为下侧的方式将多层培养容器30倾斜大致90
°
。然后,将通气孔盖32与泵连接,利用泵将已播种细胞的培养液导入多层培养容器30内。其次,如图2(b)所示,若将多层培养容器30恢复为直立,培养液便被分配至多层培养容器30的各托盘31,并于各托盘31进行细胞培养。
[0033]
《第1实施方式》
[0034]
为了观察这样的多层培养容器30中的培养细胞,本实施方式的多层培养容器观察系统1,如图3所示那样具有多层培养容器观察装置10和托架装置(台车装置)20。此外,图3是表示多层培养容器观察系统1的立体图,表示使搭载有多层培养容器30的托架装置20移动至作为观察位置的多层培养容器观察装置10的内部的状态。以下,针对各构成来进行说明。
[0035]
图4是用以说明本实施方式的托架装置20的立体图。如图4(a)所示,托架装置20是由具有车轮22的托架21、和将多层培养容器30固定于托架(台车)21的固定构件23所构成。此外,在托架装置20中,托架21与固定构件23装卸自如。具体而言,通过将固定构件23相对于托架21向上(z轴正方向)抬起,可如图4(b)所示那样将固定构件23自托架21拆卸。此外,相反地,通过将固定构件23放置于托架21之上,可将固定构件23安装于托架21。此外,托架21与固定构件23分别具有相互地嵌合的嵌合部(未图示),由此,托架21与固定构件23仅沿着上下方向(z轴方向)装卸自如,而在水平方向(xy轴方向)上被固定。其结果,可防止在托架装置20的移动中,固定构件23自托架21掉落的情形。
[0036]
如图4所示,固定构件23在将多个多层培养容器30并列地加以配置的状态下,可同时地固定该多个多层培养容器30。此外,在本实施方式中,托架装置20虽以最多可搭载4个多层培养容器30的方式所构成,但并不限定于该构成,既可以最多可搭载1~3个多层培养容器30的方式来构成托架装置20,或者也可以可搭载5个以上的多层培养容器30的方式来构成托架装置20。
[0037]
如图4(a)所示,固定构件23具有:基座24,其供多层培养容器30来载置;框构件25,其以多层培养容器30不会沿着水平方向(xy轴方向)偏移的方式防护多层培养容器30的4个长边;和紧固构件26,其卡止于框构件25,在使多层培养容器30旋转的情况下,以多层培养容器30不会自上方向(z轴方向)飞出的方式进行防护。例如,作业人员可通过将多层培养容器30放置于基座24之上且框构件25的框内,其后,以利用紧固构件26按压多层培养容器30
之上侧使紧固构件26与框构件25卡止,由此使多层培养容器30固定于固定构件23。
[0038]
此外,图5是例示本实施方式的托架装置20的观察状态的立体图,图6是用以说明横框构件251的装卸方法的图。在图4所示的托架装置20中,可通过将螺丝等紧固件29松开(或通过将紧固件29卸下),而如图5所示那样将构成框构件25的一部分的一对横框构件251自固定构件23拆卸。由此,成为托架装置20的侧面的一部分具有自上端至下端露出的侧面露出部,而可于利用多层培养容器观察装置10来观察多层培养容器30中的培养状况的情况下,有效地防止因为横框构件251妨碍而无法观察多层培养容器30的情形。此外,在使用后述的多层培养容器操作装置40来操作多层培养容器30的情况下,为了安全,优选是如图6(a)至(c)所示那样,将横框构件251的沟槽部挂卡于紧固件29,并将紧固件29锁紧,由此,将一对横框构件251安装于固定构件23。如此,一对横框构件251可相对于框构件25自由地装卸。
[0039]
此外,横框构件251通过安装于框构件25,虽可如图4所示那样固定多层培养容器30,但由于即便假使未将横框构件251安装于框构件25,其余的框构件25(沿着多层培养容器30的积层方向延伸的框构件25)也将多层培养容器30的四角加以固定,因此在利用多层培养容器观察装置10来观察多层培养容器30的培养组织时,可有效地防止多层培养容器30自托架装置20掉落的情形。
[0040]
其次,对本实施方式的多层培养容器观察装置10进行说明。图7是表示本实施方式的多层培养容器观察装置10的方块图。如图3及图7所示,多层培养容器观察装置10具有摄像装置11、照明装置12、第1至第4框架111、112、121、122、驱动部13、收容部14、触控面板部15、控制部16和风扇17。
[0041]
摄像装置11是具有透镜,用以使焦点对准于多层培养容器30的各托盘31的底面,而拍摄附着于各托盘31的底面的培养细胞的相机。摄像装置11虽只要为相机便无特别地限定,但优选为搭载变焦透镜,而能够以不同的倍率来拍摄各托盘31的影像。此外,在本实施方式中,摄像装置11卡合于沿着x轴方向延伸的第1框架111,并通过驱动部13而可使摄像装置11沿着第1框架111朝x轴方向移动。此外,第1框架111与沿着z轴方向延伸的第2框架112卡合,并通过驱动部13而可使第1框架111沿着第2框架112朝z轴方向移动,伴随于此,可使摄像装置11也朝z轴方向移动。如此,摄像装置11通过驱动部13而可沿着第1框架111和第2框架112朝二维方向(xz轴方向)移动。此外,驱动部13具有电动马达及/或气压缸,由此,可驱动各框架111、112、121、122。
[0042]
照明装置12是朝向摄像装置11照射光的照明装置。照明装置12虽也未特别地限定,但可使用例如光源为led(发光二极管;light emitting diode)。此外,在本实施方式中,照明装置12卡合于第3框架121,并通过驱动部13而可使照明装置12沿着第3框架121朝x轴方向移动。此外,第3框架121与第4框架122卡合,并通过驱动部13使第3框架121沿着第4框架122朝z轴方向移动,伴随于此,可使照明装置12也朝z轴方向移动。如此,照明装置12与摄像装置11同样地,可通过驱动部13而沿着第3框架121及第4框架122朝二维方向(xz轴方向)移动。
[0043]
此外,在本实施方式中,在搭载多层培养容器30的托架装置20被收容于收容部14的情况下,如图8所示那样,摄像装置11与照明装置12被配置为在中间夹隔多层培养容器30而相对向。因此,在图3所示的例子中,在摄像装置11被配置于多层培养容器30的右侧(y轴
正方向侧)的情况下,照明装置12被配置于多层培养容器30的左侧(y轴负方向侧)。此外,图8是用以说明摄像装置、多层培养容器及照明装置的位置关系的图。
[0044]
摄像装置11与照明装置12优选是如图8所示那样,被配置于倾斜地通过多层培养容器30的同一光轴l上,且优选是以摄像装置11朝向斜上方,而照明装置12朝向斜下方的方式被设定。此外,摄像装置11及照明装置12的朝向虽可分别进行调整,但优选是以光轴l相对于位于中间的托盘31的底面、呈大致45
°
的角度(例如40~50
°
的角度)进行交叉的方式,来调整摄像装置11及照明装置12的朝向。
[0045]
此外,在本实施方式中,在将搭载多层培养容器30的托架装置20收容于收容部14的情况下,如图5所示那样,将横框构件251自框构件25拆卸,托架装置20被收容于收容部14。由于通过将横框构件251自框构件25拆卸,横框构件251便不存在于摄像装置11及照明装置12的光轴上,因此可优选地观察多层培养容器30各层的培养状况。
[0046]
驱动部13使摄像装置11及照明装置12朝二维方向(xz轴方向)移动。尤其,在本实施方式中,驱动部13是以摄像装置11与照明装置12被配置于同一光轴l上,且摄像装置11与照明装置12的相对位置不变的方式,使摄像装置11与照明装置12朝相同的方向供移动相同的距离。例如,在本实施方式中,如后所述般,作业人员可操作触控面板部15来指示想要观察的托盘31的位置,例如,在作业人员操作触控面板部15而指示使其朝x轴正方向移动5mm的情况下,驱动部13将摄像装置11以沿着第1框架111朝x轴正方向移动5mm的方式进行驱动,并且将照明装置12以使第3框架121朝x轴正方向移动5mm的方式进行驱动。此外,驱动部13可通过将摄像装置11和照明装置12朝上下方向(z方向)移动来观察不同的层(段)的托盘31,而且,可通过使摄像装置11及照明装置12朝左右方向(x方向)移动来观察不同的多层培养容器30。
[0047]
收容部14是用以收容搭载有多层培养容器30的托架装置20的空间。收容部14具有用以将托架装置20固定于既定观察位置的固定件,由此,可将托架装置20固定于收容部14的观察位置,并利用摄像装置11来拍摄多层培养容器30的各托盘31的培养细胞。此外,在收容部14的入口安装有门141。
[0048]
触控面板部15作为作业人员输入指示的输入部而发挥功能,并且也作为显示摄像装置11所拍摄的影像的显示部而发挥功能。在本实施方式中,触控面板部15的显示器的显示区域被分割为输入用及拍摄影像显示用,在拍摄影像显示用显示区域显示有拍摄影像,并且于输入用显示区域显示有用以供作业人员进行指示的按钮(图符)。作业人员通过按压在输入用显示区域所显示的按钮(图符),可指示摄像装置11要拍摄的位置等。
[0049]
控制部16具有存储有程序的rom(只读存储器;read only memory)、执行被存储于rom的程序的cpu(中央处理单元;central processing unit)、及作为可存取的储存装置而发挥功能的ram(随机存取内存;random access memory)。控制部16根据所预先储存的程序而将摄像装置11所拍摄的拍摄影像显示于触控面板部15、或根据被输入于触控面板部15的作业人员的指示而将驱动命令输出至驱动部13。此外,在控制部16的上方设置有风扇17。风扇17被设置为对控制部16进行抽吸,由此,可将控制部16加以冷却。本实施方式的多层培养容器观察装置10由于多适合进行培养的相对较高的温度(例如37℃)下被使用,因此通过设置风扇17,可减少控制部16因热而故障的情形。
[0050]
如上所述,在第1实施方式的多层培养容器观察系统中,由于可在托架装置20搭载
有多层培养容器30的状态下观察各多层培养容器30的各托盘31中的培养细胞,因此无需如习知般将多层培养容器30一次一个地移载至专用的观察位置(基座),可减少作业人员的劳动量,并且可防止对多层培养容器30内的培养基造成不必要的冲击、或不必要地接触多层培养容器30的情形。此外,在本实施方式的多层培养容器观察系统1中,由于可在1台托架装置20并排地搭载多个多层培养容器30,因此也可一次便观察多个多层培养容器30的各托盘31中的培养细胞。
[0051]
《第2实施方式》
[0052]
其次,对第2实施方式的多层培养容器观察系统1a进行说明。在第2实施方式的多层培养容器观察系统1a中,除了第1实施方式的多层培养容器观察系统1的构成以外,还具有用以操作(操控)多层培养容器30的多层培养容器操作装置40。
[0053]
即,在第2实施方式中,构成为如下的系统:在使用多层培养容器操作装置40将播种有细胞的培养液导入多层培养容器30,并将多层培养容器30培养固定期间后,可于将多层培养容器30搭载于托架装置20的状态下进行使用多层培养容器观察装置10对所培养的细胞进行观察的一连串的作业。以下,对多层培养容器操作装置40进行说明。
[0054]
多层培养容器操作装置40是用以操作多层培养容器30的装置(操控)。此处,图9是表示多层培养容器操作装置40的立体图,图10是表示多层培养容器操作装置40的方块图。如图10所示,多层培养容器操作装置40具有旋转部41、旋转驱动部42、振荡部(震动部)43、振荡驱动部44、驱动控制部45、操作部46、臂驱动部47、一对臂48、和本体49。驱动控制部45预先储存如下的用以操作多层培养容器30的操作程序,并根据该操作程序使旋转驱动部42和振荡驱动部44驱动:将播种有细胞的培养液导入多层培养容器30的培养液导入处理、自多层培养容器30回收培养液的培养液回收处理、将胰蛋白酶液导入多层培养容器30的胰蛋白酶导入处理、使多层培养容器30振荡的细胞剥离处理、自多层培养容器30回收胰蛋白酶液的胰蛋白酶液回收处理。具体而言,驱动控制部45通过根据该程序来控制旋转驱动部42的动作,使旋转驱动部42令旋转部41进行旋转动作,并且通过控制振荡驱动部44的动作,使振荡驱动部44令振荡部43进行振荡动作。此外,在本实施方式中,旋转驱动部42及振荡驱动部44具有电动马达,接受电力的供给,来驱动旋转部41及振荡部43。
[0055]
如图9所示,旋转部41具有作为保持多层培养容器30的保持构件而发挥功能的一对卡止构件411。卡止构件411被固定于旋转部41的两侧面,且如图10及图11(a)至(c)所示那样,具有凹部412。此外,凹部412具有锥形部413及沟槽部414,如后所述,在固定构件23通过臂48而朝上方被移动的情况下,可如图11(b)所示那样卡止于固定构件23的被卡止部28,而与臂48一起夹持固定构件23并将其固定于旋转部41。图11(a)、(b)是用以说明被卡止部28与卡止构件411的关系的图,而图11(c)是卡止构件411的放大图。此外,在本实施方式中,如图4(a)所示,固定构件23的被卡止部28被形成为使框构件25中多层培养容器30的侧面连续于多层培养容器30的朝排列方向延伸的部分,成为具有长度w1的薄板状的构件。
[0056]
此外,多层培养容器操作装置40具有作为多层培养容器30的支持构件而发挥功能的一对臂48。如图12所示,一对臂48可分别插通于在固定构件23所设置的2个插通孔27。图12是表示将多层培养容器30暂时固定于臂48的状态的立体图。一对臂48可通过臂驱动部47而沿着上下方向(z轴方向)移动,臂驱动部47根据驱动控制部45的指示,将臂48沿着z轴方向驱动至2条臂48可插通于固定构件23的插通孔27的高度位置。由此,作业人员使托架装置
20朝向本体49移动,而使2条臂48可插通于固定构件23的2个插通孔27。此外,在臂48的前端部的侧面收纳有夹具(clamp)481,若臂48插通插通孔27,夹具481便自通过插通孔27的臂48的前端部的侧面突出。然后,驱动控制部45在2条臂48插通于固定构件23的2个插通孔27的状态下,使臂驱动部47将臂48朝上方(z轴正方向)驱动,由此将多层培养容器30抬起至旋转部41的位置。由此,如图11(b)所示,旋转部41的卡止构件411与固定构件23的被卡止部28卡止,固定构件23通过一对卡止构件411及一对臂48而由旋转部41所夹持,由此多层培养容器30连同固定构件23一起被固定于旋转部41。此外,在本实施方式中,臂驱动部47可通过电动马达或气压缸来驱动一对臂48。
[0057]
然后,驱动控制部45如图9的符号r及p所示那样,使旋转驱动部42进行以旋转轴x1、x2的双轴为中心而使旋转部41旋转的旋转动作。此外,如图9所示,旋转轴x1是沿着x轴方向延伸的旋转轴,由此,可使旋转部41及被保持于旋转部41的多层培养容器30朝辊方向r旋转。此外,旋转轴x2是沿着y轴方向延伸的旋转轴,由此,可使旋转部41及被保持于旋转部41的多层培养容器30朝间距方向p旋转。此外,在旋转动作中,辊方向r的旋转可于未满
±
180
°
的范围内进行,在本实施方式中,可在
±
120
°
的范围内使旋转部41朝辊方向r旋转。此外,间距方向p的旋转也可在未满
±
180
°
的范围内进行,在本实施方式中,可在
±
30
°
的范围内使旋转部41朝辊方向r旋转。此外,在本实施方式中,旋转驱动部42具有以旋转轴x1使旋转部41旋转的电动马达及/或气压缸、以及以旋转轴x2使旋转部41旋转的电动马达及/或气压缸,由此,可使旋转部41以两轴旋转。
[0058]
此处,图13是表示以旋转轴x1为中心的利用旋转驱动部42所进行的旋转部41(多层培养容器30)的旋转动作的一例的图,而图13(a)表示旋转部41将多层培养容器30抬起后的状态(基准位置)。例如,旋转驱动部42可使旋转部41(多层培养容器30)自图13(a)所示的基准位置,如图13(b)所示那样以旋转轴x1为中心朝左方向旋转90
°
。此外,旋转驱动部42也可使旋转部41(多层培养容器30)如图13(c)所示那样以旋转轴x1为中心而自基准位置朝左方向旋转100
°
,还可如图13(d)所示那样以旋转轴x1为中心而自基准位置朝左方向旋转120
°
。如此,旋转驱动部42可使旋转部41(多层培养容器30)以旋转轴x1为中心,自基准位置而在
±
0~120
°
的范围内朝辊方向r旋转。
[0059]
此外,图14是表示以旋转轴x2为中心的旋转部41(多层培养容器30)的旋转动作、以及以旋转轴x1及x2的两轴的旋转部41(多层培养容器30)的旋转动作的一例的图。旋转驱动部42可自图14(a)所示的基准位置,使旋转部41(多层培养容器30)以旋转轴x2为中心朝间距方向p旋转。例如,在图14(b)所示的例子中,以旋转部41(多层培养容器30)的上方朝前方(x轴负方向)倾斜的方式,使旋转部41(多层培养容器30)以旋转轴x2为中心旋转20
°
。此外,旋转驱动部42也可以旋转部41(多层培养容器30)的下方朝前方(x轴负方向)倾斜的方式,使旋转部41(多层培养容器30)以旋转轴x2为中心旋转。如此,旋转驱动部42可使旋转部41(多层培养容器30)以旋转轴x2为中心,自基准位置而在
±
0~30
°
的范围内朝间距方向p旋转。
[0060]
此外,如图14(c)、(d)所示,旋转驱动部42可使旋转部41(多层培养容器30)以旋转轴x1为中心朝辊方向r旋转,并且以旋转轴x2为中心朝间距方向p旋转。例如,在图14(c)所示的例子中,使旋转部41(多层培养容器30)以旋转轴x1为中心朝左方向旋转100
°
,并且以旋转部41(多层培养容器30)的上方朝前方(x轴负方向)倾斜的方式,以旋转轴x2为中心旋
转20
°
。此外,在图14(d)所示的例子中,使旋转部41(多层培养容器30)以旋转轴x1为中心朝左方向旋转120
°
,并且以旋转部41(多层培养容器30)的上方朝前方(x轴负方向)倾斜的方式,以旋转轴x2为中心旋转20
°
。
[0061]
此外,旋转驱动部42也可进行使旋转部41(多层培养容器30)以旋转轴x1或旋转轴x2为中心往返旋转的摆动动作。例如,旋转驱动部42可通过使旋转部41(多层培养容器30)以旋转轴x1为中心朝辊方向r而在
±
120
°
的范围内往返旋转,而进行以旋转轴x1为中心的摆动动作。此外,旋转驱动部42也可通过使旋转部41(多层培养容器30)以旋转轴x2为中心,以在使旋转部41(多层培养容器30)的上方朝前方(x轴负方向)倾斜之后使旋转部41(多层培养容器30)的下方朝前方(x轴负方向)倾斜的方式朝间距方向p在
±
20
°
的范围内往返旋转,而进行以旋转轴x2为中心的摆动动作。
[0062]
振荡部43在不进行后述的振荡动作的情况下,被收容于多层培养容器操作装置40的本体49内部,而在进行振荡动作的情况下,根据上述驱动控制部45的控制,如图15所示那样通过振荡驱动部44而朝向本体49的外侧被突出。此外,图15是表示于多层培养容器操作装置40中使振荡部43突出的状态的立体图。振荡部43具有可供多层培养容器30连同固定构件23一起载置的面积的上表面431,可将多层培养容器30连同固定构件23一起放置于上表面431而进行水平方向的振荡动作。此外,振荡部43虽然与托架21同样地具有用以与固定构件23嵌合的嵌合部(未图示),由此与固定构件23在上下方向(z轴方向)上装卸自如,但在水平方向(xy轴方向)上限制固定构件23的移动,而防止固定构件23自振荡部43掉落的情形。此外,只要为朝向水平方向(xy轴方向)的振荡动作,振荡驱动部44可使振荡部43进行任意的振荡动作。例如,振荡驱动部44可使振荡部43进行左右方向的振荡动作(y轴方向上的往返动作)、前后方向的振荡动作(x轴方向上的往返动作)或8字形方向的振荡动作(组合x轴方向与y轴方向的振荡动作)等各种振荡动作。
[0063]
在本实施方式中,驱动控制部45可接着利用旋转部41所进行的旋转动作,进行利用振荡部43所进行的振荡动作。在该情况下,驱动控制部45若利用旋转部41所进行的旋转动作结束,便控制臂驱动部47而将一对臂48朝下方(z轴负方向)驱动,而以多层培养容器30连同固定构件23一起被放置于振荡部43的上表面431的方式动作。然后,驱动控制部45控制振荡驱动部44,而使振荡部43进行使多层培养容器30振荡的振荡动作。此外,在本实施方式中,臂48在未被收纳于本体49而突出的状态下进行振荡动作。在本实施方式中,如图16所示,由于插通孔27的内宽w3被设计为较臂48的外宽w2与振荡部43的振荡幅度的合计更宽,因此可在将臂48插通于插通孔27的状态下进行振荡动作。此外,在振荡动作时夹具481被收纳至臂48内。此外,图16是用以说明振荡动作中臂48与插通孔27的关系的图。
[0064]
此外,驱动控制部45可接着利用振荡部43所进行的振荡动作,进行利用旋转部41所进行的旋转动作。在该情况下,驱动控制部45若利用振荡部43所进行的振荡动作结束,便控制臂驱动部47将一对臂48朝上方(z轴正方向)驱动,而以将多层培养容器30同固定构件23一起朝上抬起的方式动作。然后,驱动控制部45控制振荡驱动部44将振荡部43收纳至本体49的内部后,控制旋转驱动部42,使旋转部41进行旋转动作。
[0065]
如上所述,在利用多层培养容器操作装置40来操作搭载多层培养容器30的托架装置20的情况下,优选为如图4所示那样将横框构件251安装于框构件25。由此,可更安全地利用多层培养容器操作装置40来操作多层培养容器30。
[0066]
操作部46是用以供作业人员输入指示的装置,例如可设为具有触控面板的构成。作业人员可通过对操作部46进行操作,而将驱动控制部45所预先储存的程序的开始、暂时停止、结束等指示传递至驱动控制部45,从而使旋转部41或振荡部43的动作开始、暂时停止、结束等。此外,作业人员也可通过对操作部46进行操作,而使驱动控制部45储存新的程序、或使所储存的程序的一部分变更。例如,作业人员可通过对操作部46进行操作,而在自多层培养容器30回收培养液的培养液回收处理中,将旋转部41的旋转轴x1的倾斜角度自100
°
变更为120
°
等。
[0067]
如此,在本实施方式的多层培养容器操作装置40中,自托架装置20将固定有多层培养容器30的固定构件23抬起并加以保持,且进行多层培养容器30的旋转动作及振荡动作,由此作业人员可不接触多层培养容器30便进行如下的一连串的处理:播种有细胞的培养液朝向多层培养容器30的导入、进一步于细胞培养后的培养液的回收、胰蛋白酶液向多层培养容器30的导入、细胞剥离处理、及细胞剥离后的胰蛋白酶液的回收。尤其,习知在将胰蛋白酶液导入多层培养容器30之后,作业人员会以徒手作业的方式先将多层培养容器30自多层培养容器操作装置卸下,移载至专用的振荡器,并利用专用的振荡器使多层培养容器30振荡之后,进一步由作业人员以徒手作业的方式将多层培养容器30再次装载至多层培养容器操作装置,并进行胰蛋白酶液的回收处理。因此,存在有于细胞培养处理中作业人员的劳动量增大的问题。此外,也存在因作业人员进行徒手作业而使作业产生偏差的情形、或因作业人员不必要地接触多层培养容器30而导致多层培养容器破损且产生污染的问题。相对于此,在本实施方式的多层培养容器操作装置40中,由于作业人员可不接触多层培养容器30便进行上述一连串的处理,因此可解决如上所述的问题。
[0068]
而且,在第2实施方式的多层培养容器观察系统1a中,通过具有多层培养容器操作装置40,作业人员可不接触多层培养容器30便进行自培养液朝向多层培养容器30的导入,至细胞培养、培养细胞的观察、培养细胞的回收为止的一连串的处理。即,作业人员可使用多层培养容器操作装置40将播种有细胞的培养液导入多层培养容器30,其后,自多层培养容器操作装置40直接使多层培养容器30返回托架装置20,并在该状态下直接利用托架装置20使多层培养容器30移动至培养室等。此外,作业人员为了观察所培养的细胞,可使搭载于托架装置20的多层培养容器30移动至多层培养容器观察装置10的收容部14内,并在将多层培养容器30搭载于托架装置20的状态下,使用多层培养容器观察装置10来观察培养细胞。此外,作业人员于观察的结果而判断为细胞培养已完成的情况下,可使多层培养容器30保持于多层培养容器操作装置40,并利用多层培养容器操作装置40进行培养液的回收处理、胰蛋白酶液的导入处理、细胞剥离处理、胰蛋白酶液的回收处理。
[0069]
如以上所述,在第2实施方式的多层培养容器观察系统1a中,由于作业人员可不接触多层培养容器30便进行多层培养容器30的操作与观察,因此作业人员可不接触多层培养容器30便进行自播种有细胞的培养液朝向多层培养容器30的导入,至细胞培养、培养细胞的观察、及所培养的细胞的回收为止的一连串的作业。由此,可减少大量的细胞培养时作业人员的劳动量,并且可有效地防止因对多层培养容器30内的培养基造成不必要的冲击、或不必要地接触多层培养容器30而对培养细胞所造成的不良影响。
[0070]
《第3实施方式》
[0071]
在第3实施方式的多层培养容器观察系统1b中,主要在多层培养容器操作装置40a
不具有振荡部43及振荡驱动部44的部分,与第2实施方式的多层培养容器观察系统1a不同。以下,对与第2实施方式相同的构成标示相同的符号,并省略说明。图17是表示本实施方式的多层培养容器操作装置40a的方块图。如图17所示,多层培养容器操作装置40a具有旋转部41、旋转驱动部42、驱动控制部45、操作部46、臂驱动部47、一对臂48和本体49。驱动控制部45预先储存有如下的用以操作多层培养容器30的操作程序:将播种有细胞的培养液导入多层培养容器30的培养液导入处理、自多层培养容器30回收培养液的培养液回收处理、将胰蛋白酶液导入多层培养容器30的胰蛋白酶导入处理、使多层培养容器30振荡的细胞剥离处理、及自多层培养容器30回收胰蛋白酶液的胰蛋白酶液回收处理。旋转驱动部42具有使旋转部41以旋转轴x1为中心旋转的第1电动马达、及使旋转部41以旋转轴x2为中心旋转的第2电动马达。
[0072]
细胞剥离处理以通过旋转部41使多层培养容器30以第1旋转轴或第2旋转轴为中心朝第1方向(例如右方向)及第2方向(例如左方向)使多层培养容器30往返摆动来进行的方式,被程序化为操作程序。操作程序具有于自朝向第1方向的旋转动作切换为朝向第2方向的旋转动作时及自朝向第2方向的旋转动作切换为朝向第1方向的旋转动作时,使多层培养容器30的移动停止所指定的时间的停止模式。通过具有停止模式,则即便以较容器内的液体的移动更快的速度进行摆动动作,也可通过在旋转动作的方向切换时仅使摆动动作停止指定时间,而使容器内的液体确实地碰撞容器的侧面(侧壁)。为了有效地进行细胞剥离处理,虽然使容器高速地摆动很重要,但可消除使容器高速地摆动时所产生液体的移动的延迟(时间落差)的问题。
[0073]
操作程序在胰蛋白酶液回收处理之前,执行将附着于托盘31的侧面的细胞加以回收的动作。在托盘31为具有第1至第4侧面的长方形的托盘的情况下,以上述胰蛋白酶液依序碰撞第1侧面、第2侧面、第3侧面及第4侧面的方式来操作旋转部41。通过进行这样的操作,可在将附着于托盘31的侧面的细胞回收至胰蛋白酶液内后,进行胰蛋白酶液回收处理。
[0074]
通过以上所说明的第3实施方式的多层培养容器操作装置40a,也可发挥与第2实施方式同样的效果。此外,第3实施方式即便不具有振荡部43也可进行细胞剥离处理,而由于装置构成简单,因此可降低制造成本。此外,通过具有停止模式,可消除在使容器高速摆动时所产生的液体的移动的延迟(时间落差)的问题。
[0075]
以上,虽已对本发明的优选的实施方式例进行说明,但本发明的保护范围并非被限定于上述实施方式的记载。可对上述实施方式例施加各种变更、改良,且该等施加有变更或改良的形态也包含于本发明的保护范围内。
[0076]
例如,在上述的实施方式中,虽已例示多层培养容器观察装置10具有触控面板部15的构成,但并不限定于该构成,例如,多层培养容器观察装置10也可设为个别地具备输入作业人员的指示的输入部、及显示摄像装置11所拍摄的影像的显示部的构成。
[0077]
此外,在上述的实施方式中,虽已例示将多层培养容器观察系统1、1a、1b或多层培养容器观察装置10用于观察培养细胞的构成,但并不限定于该构成,也可设为将多层培养容器观察系统1、1a、1b或多层培养容器观察装置10用于观察所培养的微生物的构成。
[0078]
此外,除了上述的实施方式以外,多层培养容器观察装置10也可具有下述的构成。即,多层培养容器观察装置10在驱动部13由气压缸所构成的情况下,可设为具有监视该气压缸的压力的压力传感器的构成。而且,可通过利用压力传感器来监视气压缸的空气压力,
来侦测气压缸的故障。此外,控制部16也可设为对驱动部13的动作次数进行计数的构成。而且,控制部16可设为根据驱动部13的动作次数,来预测构成驱动部13的电动马达或气压缸的更换时间的构成。另外,控制部16也可设为累计驱动部13的动作时间的构成。而且,控制部16也可设为根据驱动部13的动作时间,来预测ac/dc(交流/直流;alternating current/direct current)电源或电池、风扇17等的更换时间的构成。
[0079]
此外,除了上述的第2、第3实施方式以外,多层培养容器操作装置40、40a也可具有下述的构成。即,多层培养容器操作装置40、40a在旋转驱动部42及臂驱动部47由气压缸所构成的情况下,可设为具有监视该气压缸的压力的压力传感器的构成。而且,可通过利用压力传感器监视气压缸的空气压力,来侦测气压缸的故障。此外,多层培养容器操作装置40、40a可设为具有区域传感器的构成。而且,通过利用区域传感器始终监视多层培养容器操作装置40、40a的周边、尤其始终监视人进入旋转部41的周边,可提高安全性。此外,驱动控制部45也可设为对旋转部41、振荡部43、或臂48的动作次数进行计数的构成。而且,驱动控制部45可设为根据旋转部41、振荡部43、或臂48的动作次数,来预测构成旋转驱动部42、振荡驱动部44、臂驱动部47的电动马达或气压缸的更换时间的构成。另外,驱动控制部45也可设为累计旋转部41、振荡部43、或臂48的动作时间的构成。而且,驱动控制部45也可设为根据旋转部41、振荡部43、或臂48的动作时间,来预测ac/dc电源或电池、风扇等的更换时间的构成。
[0080]
此外,在上述的实施方式中,虽已例示在托架装置20中具有一组横框构件251的构成,但并不限定于该构成,例如,也可设为具有多组横框构件251的构成。
[0081]
符号说明
[0082]
1、1a、1b
…
多层培养容器观察系统
[0083]
10
…
多层培养容器观察装置
[0084]
11
…
摄像装置
[0085]
111
…
第1框架
[0086]
112
…
第2框架
[0087]
12
…
照明装置
[0088]
121
…
第3框架
[0089]
122
…
第4框架
[0090]
13
…
驱动部
[0091]
14
…
收容部
[0092]
141
…
门
[0093]
15
…
触控面板部
[0094]
16
…
控制部
[0095]
17
…
风扇
[0096]
20
…
托架装置
[0097]
21
…
托架
[0098]
22
…
车轮
[0099]
23
…
固定构件
[0100]
24
…
基座
[0101]
25
…
框构件
[0102]
251
…
横框构件
[0103]
26
…
紧固构件
[0104]
27
…
插通孔
[0105]
28
…
被卡止部
[0106]
29
…
紧固件
[0107]
30
…
多层培养容器
[0108]
31
…
托盘
[0109]
32
…
通气孔盖
[0110]
40、40a
…
多层培养容器操作装置
[0111]
41
…
旋转部
[0112]
411
…
卡止构件
[0113]
412
…
凹部
[0114]
413
…
锥形部
[0115]
414
…
沟槽部
[0116]
42
…
旋转驱动部
[0117]
43
…
振荡部
[0118]
431
…
上表面
[0119]
44
…
振荡驱动部
[0120]
45
…
驱动控制部
[0121]
46
…
操作部
[0122]
47
…
臂驱动部
[0123]
48
…
臂
[0124]
481
…
夹具
[0125]
49
…
本体。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips