
 商标分类
商标分类  商标转让
商标转让 
一种碳纳米管纤维-离子凝胶人工肌肉及其电致动性能测试方法与流程
 2021-02-02 08:02:58|
2021-02-02 08:02:58| 307|
307| 起点商标网
起点商标网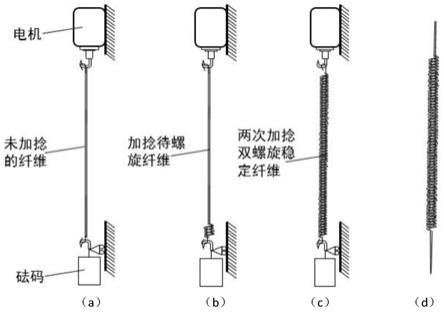
[0001]
本发明涉及电化学致动性能测试技术领域,特别涉及一种碳纳米管纤维-离子凝胶人工肌肉及其电致动性能测试方法。
背景技术:
[0002]
近年来,人工肌肉因其质量轻、工艺便捷、柔韧性好等诸多优势,受到了人们广泛的关注和研究。人工肌肉是一种在受到外界刺激时,自身产生响应,通过不同结构产生不同形变的新型材料。随着人们对人工肌肉的性能要求更高,对作为其核心部分的电致动材料性能需求也更高,但目前多数材料的力学性能和导电性能不能兼顾,存在使用过程中受力出现断裂破损、室温导电率低、驱动性能差等问题。同时,当人工肌肉在气体或液体环境下驱动时,在实际应用过程中受到很大的制约。
[0003]
高分子凝胶因其具有良好的生物相容性引起人们的广泛关注。离子的加入使高分子凝胶拥有更高的导电性。碳纳米管纤维是一种具有优异性能的宏观材料,具有高机械强度、高导电性以及良好的柔韧性,碳纳米管纤维的孔洞结构,能构筑离子传输的定向通路,增大离子迁移率从而显著提升人工肌肉的导电率和力学稳定性。将碳纳米管纤维和离子凝胶组装成人工肌肉进而设计驱动结构,推动了仿生机器人和生物医疗领域的发展。水凝胶在空气中容易失水变干,在水凝胶中溶解具有保湿能力的盐,可以降低水的蒸气压从而减缓/抑制水的蒸发,在水凝胶外面包裹一层薄薄的弹性体层,既不影响水凝胶的透明度和拉伸性,同时又可以起到保水的作用。石墨烯作为一种具有优异力学及电学性能的材料,在碳纳米管纤维-离子凝胶人工肌肉中随着石墨烯含量的增加,人工肌肉的承载能力下降,致动性能提升,所以,适量的石墨烯加入也将提升人工肌肉的驱动性能。
技术实现要素:
[0004]
本发明的目的在于提供一种碳纳米管纤维-离子凝胶人工肌肉及其电致动性能测试方法。制备过程中考虑到如何增加离子凝胶的导电性和离子凝胶的保水能力,增加了碳纳米管纤维-离子凝胶人工肌肉的使用寿命。该人工肌肉具有更高的能量转换效率和更广泛的应用环境,增强了人工肌肉的电驱动性能,有助于推动人工肌肉研究与应用的进一步发展。
[0005]
本发明采用的碳纳米管纤维-离子凝胶人工肌肉及其致动性能测试方法,主要包括以下步骤:
[0006]
1)碳纳米管纤维-离子凝胶人工肌肉的制备过程
[0007]
制备碳纳米管纤维电极:首先将浸入石墨烯溶液的碳纳米管纤维放置在n-甲基吡咯烷酮(nmp)中,使用超声波振荡器1小时,使其分布均匀,将碳纳米管纤维在n-甲基吡咯烷酮取出,随后将碳纳米管纤维一端固定,另一端用电机加捻一定圈数,随后将纤维从中间对折,再次一端固定,另一端反向加捻一定圈数后,得到稳定双螺旋结构碳纳米管纤维电极。
[0008]
离子凝胶液体配制:将一定量四乙基四氟硼酸铵加入到碳酸丙烯酯中,配置成电解质溶液。取适量聚偏氟乙烯六氟丙烯加入到丙酮溶液中,在磁力搅拌器上35℃持续加热搅拌至溶液中白色晶体完全溶解,随后稀释,得到聚合物溶液。将电解质溶液和聚合物溶液按照体积比5:1配制离子凝胶液体,加入少量硫酸钾。
[0009]
使用模具制备人工肌肉:将前述得到的碳纳米管纤维电极固定到模具的凹槽中,使用滴管缓慢滴入离子凝胶液体,使离子凝胶液体将碳纳米管纤维电极完全浸没,在室温和惰性气体环境下静置6-8小时得到碳纳米管纤维-离子凝胶人工肌肉,随后在碳纳米管纤维-离子凝胶人工肌肉表面涂覆聚二甲基硅氧烷(pdms)作为保水层。
[0010]
2)碳纳米管纤维-离子凝胶人工肌肉电致动性能测试
[0011]
将碳纳米管纤维-离子凝胶人工肌肉固定在夹具上,由电源引出电极夹头,正极夹头夹持一根碳纳米管纤维作为阳极,负极夹头夹持尾端悬挂砝码的碳纳米管纤维。将位移传感器和数据收集盒固定在重物正下方。接通电源,通过位移传感器将纤维收缩变形量收集为电信号,通过数据收集盒将电信号转换为位移信号,最终得到碳纳米管纤维的收缩变形,完成碳纳米管纤维-离子凝胶人工肌肉电致动性能测试。
[0012]
本发明的碳纳米管纤维-离子凝胶人工肌肉,在几伏的电压下,即能产生较大的形变和位移,能够输出较大的力,该碳纳米管纤维-离子凝胶人工肌肉在机器人驱动器、传感器、人工肌肉假肢结构等领域有着广阔的应用前景和应用价值,可以为人工肌肉结构的设计起到借鉴作用。
[0013]
本发明的工作原理:
[0014]
本发明所制备的一种电驱动人工肌肉能够在较低的电压下产生较大的收缩性变,当电源通电后,离子凝胶的阴阳离子向碳纳米管纤维两电极迁移,由于碳纳米管纤维电极的孔洞结构,阴阳离子附着在碳纳米管纤维电极内部或表面,使得碳纳米管纤维电极表现出径向膨胀,轴向收缩的变形,同时产生一定的驱动力。
[0015]
相比液动型或气体型人工肌肉,使用凝胶作为驱动环境不会出现溶剂挥发和漏液等现象,使制备的电致动器件的安全和稳定性能得到提高,石墨烯的加入使得该人工肌肉具有更高的能量转换效率和更广泛的应用环境,增强了人工肌肉的电驱动性能,在水凝胶中溶解具有保湿能力的盐以及在水凝胶外面包裹一层薄薄的弹性体层极大的延缓了人工肌肉的使用寿命,有助于推动人工肌肉研究与应用的进一步发展,在医疗卫生、工业产品制造以及机器人研发等领域有着广泛的用途。
附图说明
[0016]
图1碳纳米管纤维加捻过程示意图。图中,(a)为碳纳米管纤维初始状态;(b)为加捻后即将产生螺旋的碳纳米管纤维;(c)为两次加捻后得到的稳定双螺旋结构碳纳米管纤维;(d)为成品碳纳米管纤维人工肌肉。
[0017]
图2碳纳米管纤维-离子凝胶人工肌肉制备模具图。
[0018]
图3碳纳米管纤维-离子凝胶人工肌肉工作原理图。
[0019]
图4碳纳米管纤维-离子凝胶人工肌肉致动性能测试装置图。
[0020]
图5碳纳米管纤维-离子凝胶人工肌肉复合结构示意图。
具体实施方式
[0021]
一种碳纳米管纤维-离子凝胶人工肌肉及其电致动性能测试方法,实验所需材料包括:碳纳米管纤维(d=100μm,μ=0.5-0.8g/cm3),石墨烯溶液(15mg/ml),n-甲基吡咯烷酮(nmp,50mg/ml),聚二甲基硅氧烷(pdms),硫酸钾(k2so4,纯度:≥99%)碳酸丙烯酯(pc,anhydrous,99.7%),聚偏氟乙烯六氟丙烯(pvdf-co-hfp,mw:≈455000,mn:≈110000,pellets),四乙基四氟硼酸铵(纯度:98%),丙酮(ar)。
[0022]
以下结合附图对本发明的碳纳米管纤维-离子凝胶人工肌肉及其电致动性能测试方法作进一步详细说明。
[0023]
一种碳纳米管纤维-离子凝胶人工肌肉及其电致动性能测试方法主要包括碳纳米管纤维-离子凝胶人工肌肉的制备和碳纳米管纤维-离子凝胶人工肌肉电致动性能测试两部分。
[0024]
1)碳纳米管纤维-离子凝胶人工肌肉的制备过程:
[0025]
制备碳纳米管纤维电极:首先将碳纳米管纤维浸入15mg/ml石墨烯溶液,将其放置在50mg/ml的n-甲基吡咯烷酮(nmp)中,使用超声波振荡器1小时,使其分布均匀,将碳纳米管纤维取出,随后将碳纳米管纤维一端固定,另一端用电机加捻一定圈数,直至完全盘绕,随后将纤维从中间对折,再次一端固定,另一端反向进行加捻一定圈数后,得到稳定双螺旋结构碳纳米管纤维电极。
[0026]
离子凝胶液体配制:
[0027]
1.使用天平称取5.425g四乙基四氟硼酸铵,将四乙基四氟硼酸铵加入到50ml碳酸丙烯酯中,配置成浓度为0.5mol/l的电解质溶液。
[0028]
2.称取3g聚偏氟乙烯六氟丙烯加入到30g丙酮溶液中,在磁力搅拌器上35℃持续加热搅拌至溶液中白色晶体完全溶解,随后将溶液浓度稀释为1wt%,得到聚合物溶液。
[0029]
3.将步骤1,2得到的电解质溶液和聚合物溶液按照体积比5:1配制离子凝胶液体,加入少量硫酸钾。
[0030]
使用模具制备人工肌肉:取双面胶,粘附在模具凹槽处,将前述得到的碳纳米管纤维电极固定到模具的凹槽中,使用胶头滴管缓慢滴入离子凝胶液体,使离子凝胶液体将碳纳米管纤维电极完全浸没,在室温和惰性气体环境下放置6-8小时,成胶后即得到厚度为3mm的碳纳米管纤维-离子凝胶人工肌肉,随后在碳纳米管纤维-离子凝胶人工肌肉表面涂覆一薄层聚二甲基硅氧烷(pdms)作为保水层。
[0031]
2)碳纳米管纤维-离子凝胶人工肌肉电致动性能测试:
[0032]
如图4所示为碳纳米管纤维-离子凝胶人工肌肉致动性能测试装置图,主要包含以下部件:(1)传动装置、(2)滑道、(3)箱体、(4)夹具、(5)砝码、(6)位移传感器、(7)数据收集盒、(8)碳纳米管纤维-离子凝胶人工肌肉。
[0033]
通过传动装置(1)控制两端夹具(4)将碳纳米管纤维-离子凝胶人工肌肉(8)固定在夹具(4)上,由电源引出电极夹头,正极夹头夹持一根碳纳米管纤维作为阳极,负极夹头夹持尾端悬挂砝码(5)的碳纳米管纤维。将位移传感器(6)和数据收集盒(7)固定在砝码(5)正下方。接通电源,通过位移传感器(6)将纤维收缩变形量收集为电信号,通过数据收集盒(7)将电信号转换为位移信号,最终得到碳纳米管纤维的收缩变形,完成碳纳米管纤维-离子凝胶人工肌肉电致动性能测试。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips